
一、介紹
VMX智慧移動平台是專門為2022年世界技能競賽(World Skills Competition)-機器人職類所打造,使用官方指定之控制器,結合眾多可靠周邊設備,包括堅固穩定的機構,精準的馬達及編碼器,和距離感測器,大容量電池提供持久續航力,並且在平台上方預留了大空間,讓使用者能安裝各種額外所需機構(e.g.機器手臂、夾球機構等),也提供可靠的視覺辨識功能,讓使用者能更專注在功能與程式設計上,免除硬體軟體缺陷帶來的困擾。

二、VMX智慧移動平台規格
- 多功能鋁合金平台 x 1(尺寸 400(L)*235(W)*60(H))
- 原廠VMX-pi控制器 x 1
- 原廠Titan馬達控制器 x 1
- 原廠Maverick直流60:1減速馬達(含編碼器)
- 720p 150度廣角USB鏡頭 x 1
- 12V(3S) 10400mAh鋰電池(5200mAh x 2)
- 電源開關 x 2(VMX-pi控制器、馬達控制板開關)
- Sharp GP2Y0A21YK紅外線測距感測器 x 4
- HC-SR04P超聲波測距感測器 x 4
- 100mm麥克納姆輪(培林版)x 4
- 緊急停止開關 x 1
- 直流電壓表 x 1
- 羅技F710無線搖桿 x 1
- iMax鋰電池充電器 x 1
三、多功能鋁合金平台

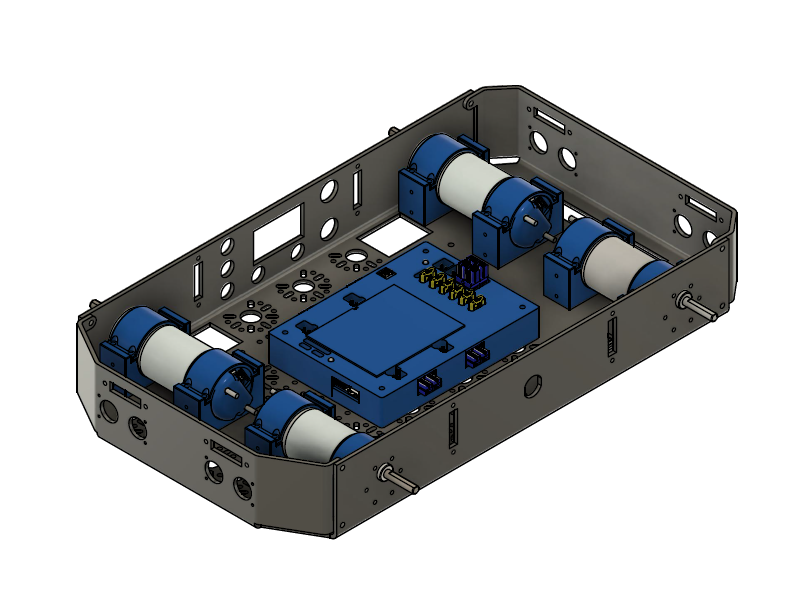
(一)規格
1. 尺寸
- 尺寸 400x235x60mm(LxWxH)
- 鋁合金厚度 3mm
2. 可安裝元件
- Studica VMX-pi控制器 x 1
- Studica Titan 馬達控制器 x 1
- Studica Maverick 直流減速馬達 x 4
- Sharp GP2Y0A21YK紅外線測距感測器 x 8
- HC-SR04P超聲波測距感測器 x 4
- 16mm 開關 x 2
- 12mm LED指示燈 x 5
- 16mm 緊急停止開關 x 1
- 0.56吋直流電壓表 x 1
- Matrix 孔位通用零件
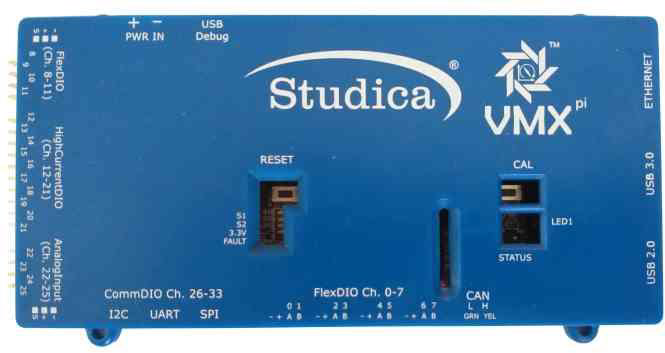
四、原廠VMX-pi控制器
VMX-pi機器人控制器由Studica機器人團隊所開發,比起典型的FRC機器人控制器,它體積更小,更多的記憶體,更好的CPU,基於Linux的操作系統,可結合更多現有設備(如Intel RealSense、LIDAR、深度攝像鏡頭等設備)。
VMX-pi機器人控制器結合Raspberry Pi 4B轉變為可靠、即時、具有嵌入式IMU和CAN Bus的機器人控制器或視覺/運動處理器。VMX-pi和Raspberry Pi可以執行即時機器人控制和更高階的機器人位置跟蹤、傳動系統路徑規劃,並且可通過Ethernet、Wifi或藍牙遠端控制。
(一)規格
- CPU:四核心 ARM Cortex-A72 64 位元 1.5 GHz
- 記憶體:4 GB LPDDR4-3200 SDRAM
- 2.4 GHz/5.0 GHz IEEE 802.11b/g/n/ac 無線網路,藍牙 5.0 BLE
- Gigabit Ethernet
- 30 Digital I/O、4 Analog I/O、SPI、I2C、TTL、UART、CAN 2.0b、9-axis IMU
- 2 個 USB 3.0 埠、2 個 USB 2.0 埠
- 2 個 micro-HDMI 埠
- Micro-SD 插槽
- 內建navX 9軸IMU,支援運動處理功能,包括向量定向驅動、自動平衡、自動旋轉到角度、碰撞檢測等。
- 內建電池,包含RTC,可同步網路時間紀錄控制器數據。
(二)其他主要特點
- 可直接在VMX-pi機器人控制器上編寫程式:既可以作為獨立的開發系統環境(透過Raspberry Pi輸入鍵盤、滑鼠、HDMI顯示器),也可透過遠端PC開發。
- 輕鬆連接周邊感測器:VMX-pi擴充板可輕鬆連接到Sparkfun QWIIC感測器系列。
- 使用C++/Java開發。
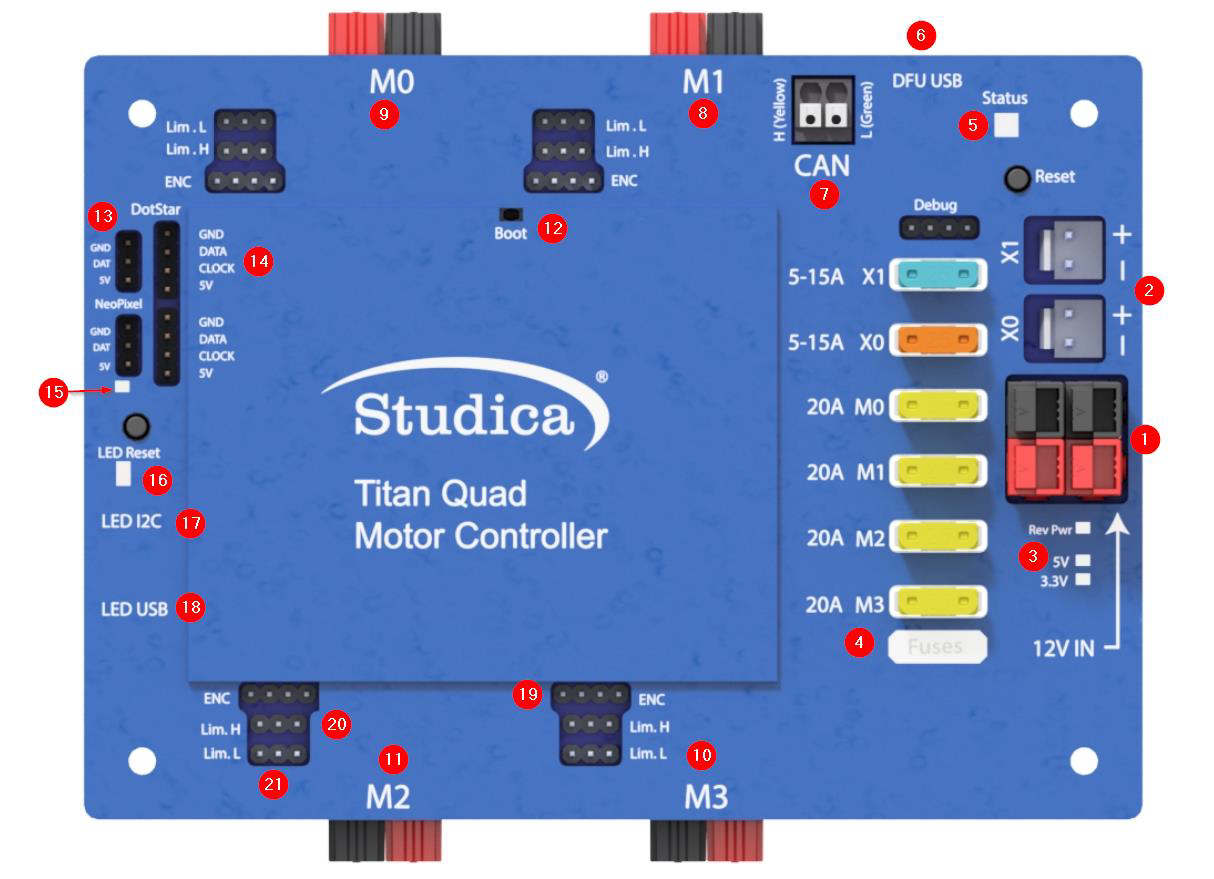
五、原廠Titan馬達控制器
Titan 馬達控制器是一個具有四個DC電機輸出的電機控制器,它透過CAN Bus接收VMX-pi控制器指令以控制馬達轉動,也可透過編碼器修正馬達轉動距離,讓車體能直直往前減少偏移,細部馬達設定還可透過額外專用軟體調整。
(一)規格
- 電源輸入。輸入需要 12VDC,兩個端口並聯。 兩個端口均可用於增加容量或作為電池輸入、電池輸出。
- 電源輸出。將12VDC輸出到其他設備,例如 VMX-pi 或Servo Power Block。
- 電壓指示器。一個反向電源指示燈(紅色),如果電壓反向連接,它會亮起。另外兩個指示燈顯示電壓5V 和3V。
- 保險絲盒。電機採用20A保險絲,電源輸出採用5-15A保險絲。
- RGB 狀態燈。
- DFU USB – 用於與PC通信以進行韌體更新和設定。
- CAN-BUS輸入 – 高端(黃色)和低端(綠色)輸入。
- M1 – 電機 1 輸出。
- M0 – 電機 0 輸出。
- M3 – 電機 3 輸出。
- M2 – 電機 2 輸出。
- Boot – 僅在發生錯誤時使用。
- NeoPixel – 可定址 LED 輸出。
- DotStar – 可定址 LED 輸出。
- LED 微控制器的引腳 13/L。
- RX/TX – 用於微控制器的 LED。
- LED i2c – 用於微控制器的 com 端口。
- LED USB – 用於與電腦通訊上傳程式碼。
- 編碼器端口 – 正交編碼器輸入。
- Limit H – 上限開關輸入。
- Limit L – 下限開關輸入。
六、原廠Maverick直流60:1減速馬達(含編碼器)


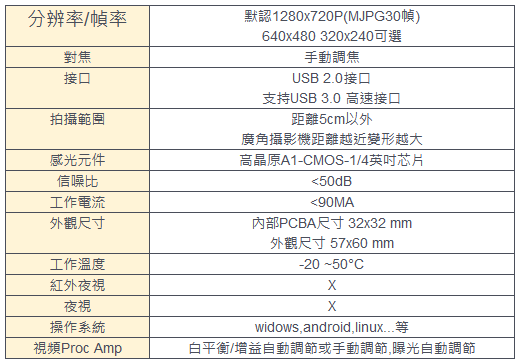
七、720p 150度廣角USB鏡頭
採用720p 150度 USB廣角鏡頭,讓VMX智慧移動平台在影像辨識有較好的效果。

八、12V(3S) 10400mAh鋰電池(5200mAh x 2)
兩顆Desire Power V8 11.1V 5200mAh 35C奈米系列鋰聚電池,高容量及高放電係數,讓VMX智慧移動平台有更好的穩定度及續航力。

(一)規格表
| 長 | 155mm |
| 寬 | 50mm |
| 高 | 29mm |
| 重量 | 408g |
| 最大連續電流 | 364A(35C) |
| 最大瞬時電流 | 182A(70C) |
| 最大充電電流 | 182A(70C) |
| 輸出端接頭 | 原廠Amass XT60接頭 |
| 平衡端接頭 | JST-XH接頭 |
九、電源開關 x 2(VMX-pi控制器、馬達控制板開關)
兩顆16mm的電源開關(帶燈),分別控制VMX-pi控制器以及Titan馬達控制板的電源輸入。
十、Sharp GP2Y0A21YK紅外線測距感測器
Sharp(夏普)開發的GP2Y0A21YK紅外線測距感測器提供10~80cm的量測距離,比起超聲波感測器更穩定且精度也較高。

| 功能 | Min | Nom | Max |
| 輸入電壓 | 4.5V | 5V | 7V |
| 輸出電壓 | -0.3V | – | VIN+0.3V |
| 感測範圍 | 10cm | – | 80cm |
| 消耗電流 | – | 30mA | 40mA |
| 工作溫度 | -10度C | – | 60度C |
十一、HC-SR04P超聲波測距感測器
HC-SR04P超聲波感測器提供2~400cm的量測距離。

| 功能 | Min | Nom | Max |
| 輸入電壓 | – | – | 5V |
| 消耗電流 | – | 15mA | – |
| 感測距離 | 2cm | – | 400cm |
| 感測角度 | – | 15度 | – |
| 聲波頻率 | – | 40Hz | – |
| 觸發脈衝時間 | – | 10uS TTL | – |
十二、100mm麥可納姆輪(培林版)
100mm的麥可納姆輪,每個滾輪都有內建培林,以提供載重重量。

十三、緊急停止開關
緊急停止開關能讓使用者在緊急狀況按下,切斷Titan馬達控制器電源,停止車體移動。

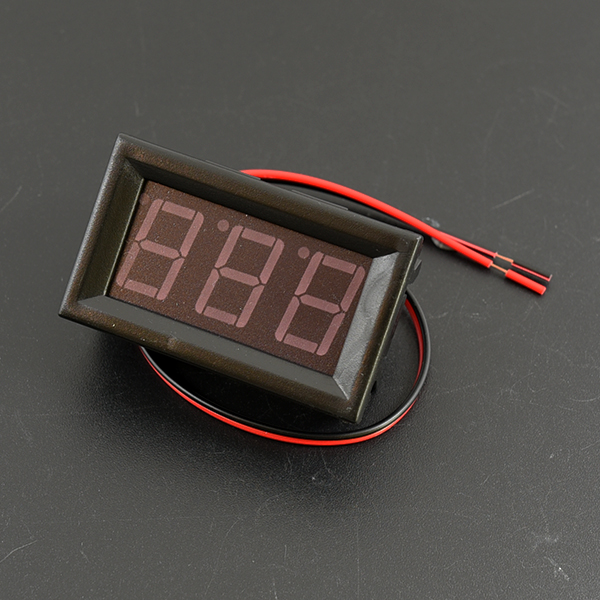
十四、直流電壓表
直流電壓表用來顯示Titan馬達控制器電池電壓。
十五、羅技F710無線搖桿
羅技F710無線搖桿為第51屆全國技能競賽-機器人職類規定的機器人控制搖桿。

十六、iMax鋰電池充電器
iMax鋰電池充電器可為多種電池充電,提供穩定、安全、高電流輸出,在大容量鋰電池充電上能更佳安全且快速,並且提供平衡充電功能,讓每顆鋰電池電壓保持一致,延長電池整體壽命。

十七、小結
VMX智慧移動平台符合全國技能競賽要求規格,並且擁有軟體方面的支持,能讓使用者更快速了解原理以及整個開發過程,一步步完成比賽所需功能。