硬體規格
單板電腦 | NVIDIA Jetson Nano Developer kit 第二代開發套件 |
GPU | 128-core NVIDIA Maxwell™ |
CPU | Quad-core ARM A57 @ 1.43 GHz |
記憶體 | 4GB 64-bit LPDDR4 25.6GB/s |
儲存空間 | microSD (不包含記憶卡) |
影片解碼器 | 4Kp60 | 2x 4Kp30 | 8x 1080p30 | 18x 720p30 (H.264/H.265) |
連線能力 | Gigabit Ethernet, M.2 Key E |
攝影機 | 2x MIPI CSI-2 connectors |
顯示器 | HDMI 與 DP |
USB | 4x USB 3.0, 1x USB 2.0 Micro-B |
其他 | ‧ 40 pin 排針連接器 (GPIO、I2C、I2S、SPI、UART) |
機械規格 | 100 mm x 80 mm x 29 mm |
作業系統 | Xubuntu 20.04 Focal Fossa L4T R32.3.1 |
攝影鏡頭 | ‧ 分辨率 3280*2464 |
光學雷達 | ‧ 掃描頻率 6Hz~12Hz |
馬達 | 金屬減速馬達(帶編碼器) x 4 額定電壓6V 扭矩1.5N.m 減速比1:90 |
馬達控制板 | ‧ USB / TTL (UART) |
車體 | 鋁合金車體(快卸磁扣式底板) |
配件 | ‧ Cat 5e 網路線 |
車子尺寸 | 約 200 x 210 x 160 mm (LxWxH) |
外箱尺寸 | 約 384 x 276 x 208 mm (LxWxH) |
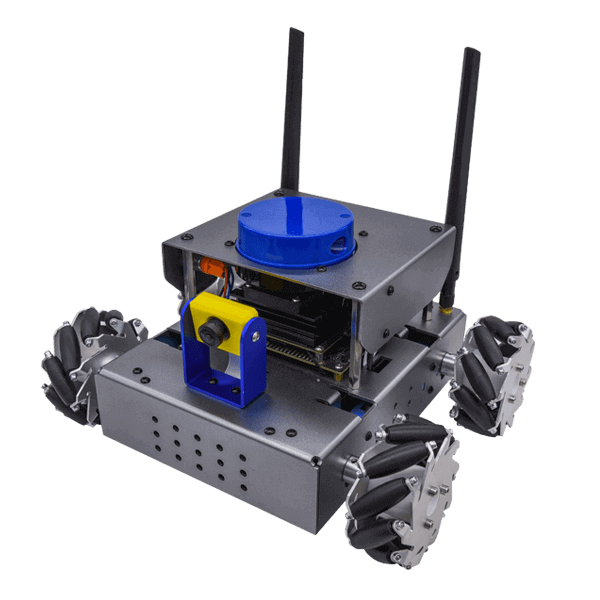
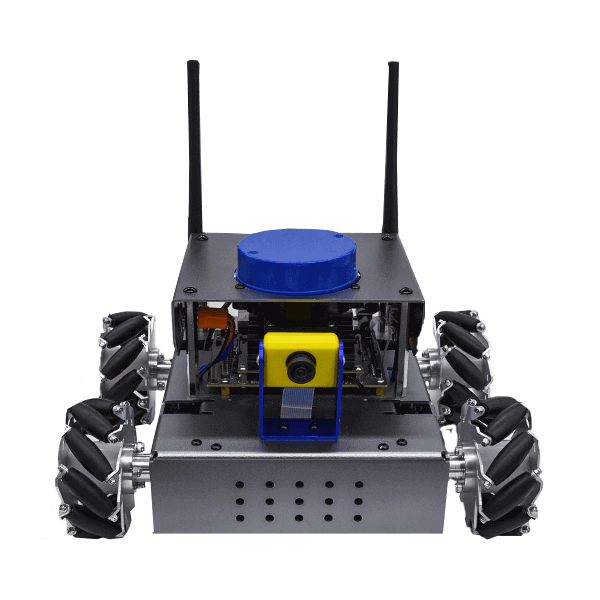
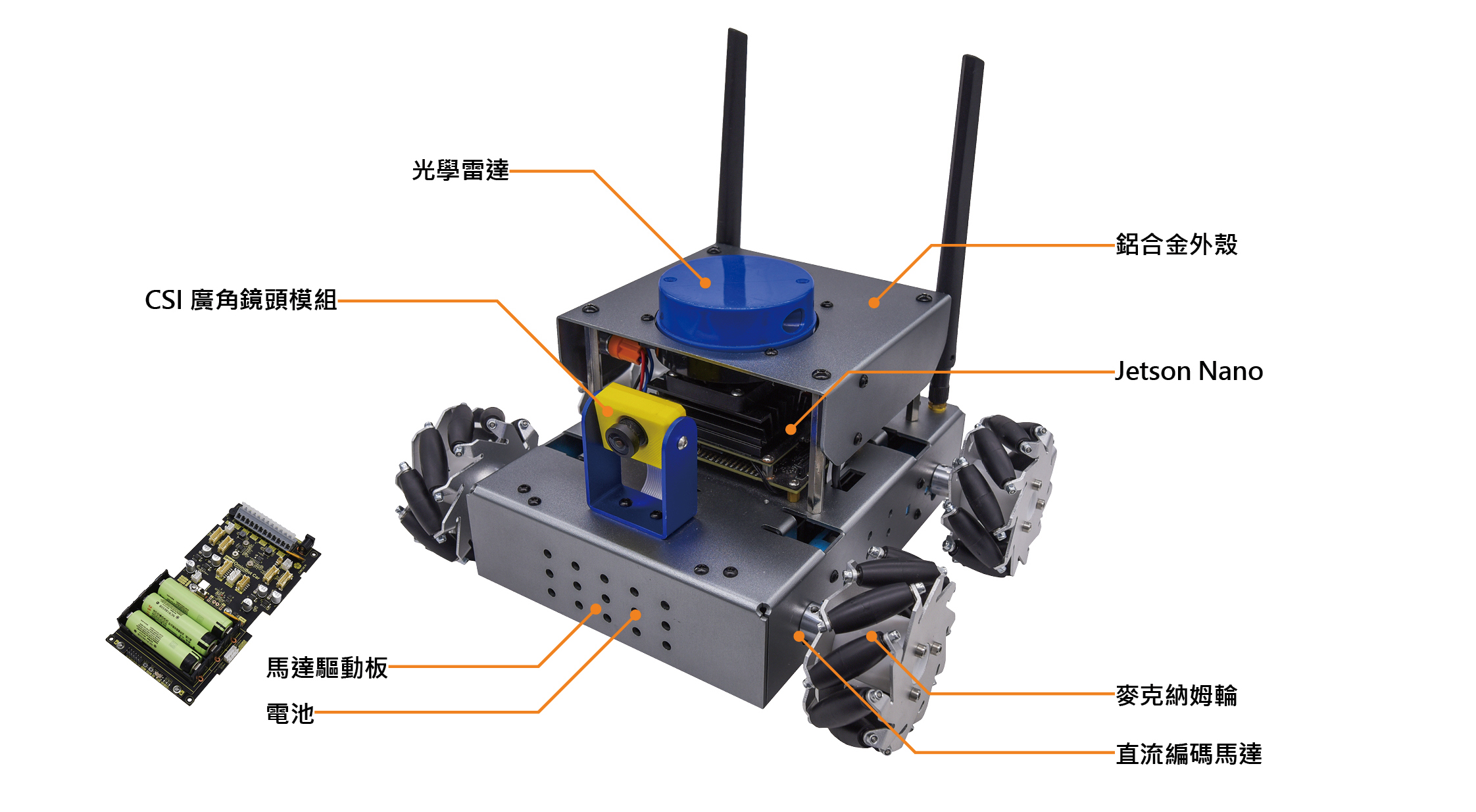
規格特色
ROSKY 智慧移動平台為 2020 ~ 2022 年「桃園 ROS Summer School 機器人暑期課程」之特選教材,是一款適合 ROS 學習者的教學教具,ROSKY 2 智慧移動平台為 ROS Summer School 的兼容版本。
● Jetson Nano 4G:運算處理速度與效能表現更出色
● YD-Lidar X4 雷達:掃描建圖,實現導航、避障功能
● IMX219-160 鏡頭:實現視覺辨識功能
● 鋁合金外殼:提高平台耐用度
● 麥克納姆輪:讓車體實現完整約束運動控制模型
◎ 研習活動
2020 桃園 ROS Summer School 機器人暑期課程

2021 桃園 ROS Summer School 機器人暑期課程

2022 桃園 ROS Summer School 機器人暑期課程
技術文章