一、簡介
Pixel:Bit 搭載 ESP32 核心具備 Camera 並且有相容 micro:bit 的「金手指」連接器 edge connector,各位是否有想過這樣 Pixel:Bit 是否也能夠像 micro:bit 一樣搭配登月小車做應用呢?本篇教學就要跟大家說明如何使用 Pixel:Bit 搭配幾乎人手一臺的登月小車,並且實作第一人稱視角(First Person View,FPV)的 Wi-Fi 遙控車。
二、所需設備
1. pixel:bit x1
2. Micro USB to USB Type-A數據傳輸線 x1
3. 登月小車 x1
三、範例程式碼
需要先行在 Arduino IDE 上安裝好 ESP32 開發板支援,若不知道如何安裝可以參考單元(二)教學。完整範例程式可由 github 上取得 PixelBit 範例程式,內含 Pixel:Bit 所有範例,並且將會不定時更新。本篇文章將會使用到其中 04_FPV_Car 的程式碼。為方便起見,我們可以直接下載整包範例程式壓縮檔,再解壓縮到電腦裡的 arduino 資料夾下。
四、範例演示
不囉嗦!直接先來看看範例成果吧!開機後 Pixel:Bit 前方 TFT 會顯示 Wi-Fi QR Code 以及其網路 IP 位置,利用手機相機掃描則會浮現Wi-Fi 連線的提示訊息,點擊之後手機就會自動的套用名稱與密碼,自動連線 Wi-Fi。隨後再開啟瀏覽器,輸入 Pixel:Bit 的 IP 位置,就會開啟 UI 控制網頁,上面包含即時的視訊影像以及動作控制按鈕,直接點選就可以操控小車囉!
五、程式解析
1. 設定方式 Setup
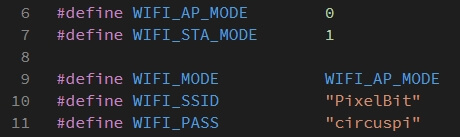
在燒錄成程式之前需要先到 config.h 設定 Wi-Fi 連線的模式,預設 Pixel:Bit 會以 AP 模式的方式運作,也就是讓手機直接連進 Pixel:Bit 進行操作。這樣的好處是不管在室內或室外,即使沒有 Wi-Fi 網路也可以進行操作。
若環境中是有 Wi-Fi 網路的,也可以將 Pixel:Bit 設定為 Satation 模式,讓手機跟 Pixel:Bit 都同時連到場域中的熱點,如此一來也可以降低 Pixel:Bit的運算負荷。SSID 與 Password 也依照環境與喜好修改完成之後即可以進行燒錄。分別燒錄 ESP32 程式碼與 ATmega328 程式碼完成後,即可以將 UART 選擇開關切至「go」進行操作了!(如果還不清楚怎麼樣燒錄程式碼,可以參考前面的單元(二)教學)
2. 產生二維碼 Generate QR Code
大家在使用物聯網開發板時,經常都會有一種困擾,就是不知道開發板現在的 Wi-Fi SSID、密碼與 IP 等資訊,時常都還需要連接序列埠到電腦監看,甚至在輸入密碼時可能因為手抖而不小心輸入錯誤,真的相當的惱人啊!
在 Pixel:Bit 上有一個 TFT 顯示器,我們可以很方便的把 Wi-Fi 網路資訊顯示在上面。而連線 Wi-Fi 的 QR code 格式為 WIFI:T:WPA;S:YourSSID;P:YourPass;;,詳細的說明如下表所示:
舉例來說,我們只要將 WIFI:T:WPA;S:PixelBit;P:circuspi;; 這串文字轉換為 QR Code 顯示在 TFT 顯示器上,再使用手機掃描,手機就會自動地連入 Pixel:Bit 這組 Wi-Fi 網路,是不是相當方便呢?

在此範例中我們引用的函式庫是 github 上開發者 ricmoo 所編寫的 library,為了方便起見,我們直接內嵌在此範例的程式碼中。我們使用版本 3 的 QR Code,像素為 29×29,不同版本像素與訊息量皆有不同,例如版本 4 的像素為 33×33、版本 5 的像素為 37×37 等,完整資訊可以參閱 QR Code標準。
3. 網頁伺服器 WEB Server
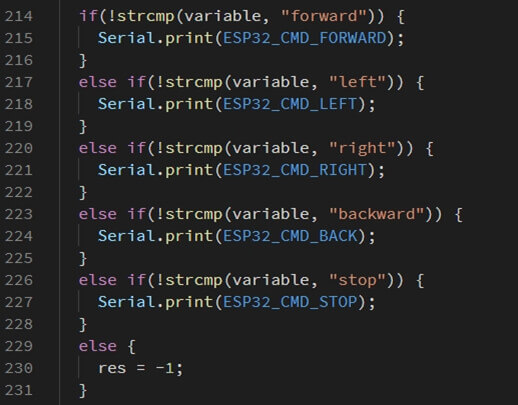
ESP32 的程式碼則是由國外的開發者 Rui Santos 旗下專案所修改而來的,如下圖所示。網頁伺服器的程式碼結構由原生範例 CameraWebServer 差異不大。在即時串流的部分使用 <IP>:81/stream 讀取影像資料,而各個對應按鈕則是用 Command Handler 的方式在各個按鈕被按下時,觸發 <IP>/action?go= HTTP GET 方法呼叫,並再 handler 中將對應的指令透過序列埠 Serial.print() 傳送給 ATmega328 執行動作。
4. 馬達控制 Motor Control
馬達控制將會透過 ATmega328p 經由邊緣連接器連到登月小車 MoonCar 上的馬達。從下方的 Pixel:Bit 與登月小車腳位對照圖可以看出,左輪的控制對應到 ATmega328p 的 2 跟 14 腳控制,而右輪的控制對應到 A1 與 13 腳控制,因此只要依照下表的方式控制這幾隻 pin 腳的電位,就能夠控制小車的動作姿態囉!
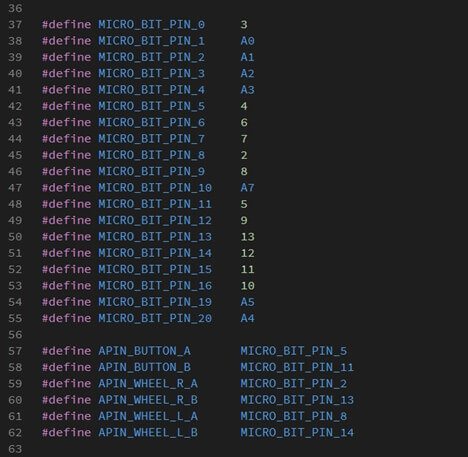
為了方便我們閱讀程式碼,先在 PixelBit_FPV_Car_328p\config.h 檔案中定義好 ATmega328 各個腳位的名稱,也避免後續忘記各個 pin 腳的功能。
如下圖中程式所示,第 37~55 行先定義出 Pixel:Bit 邊緣連接器所對應 ATmega328 的 IO。第 57~62 行則延伸定義好左右輪的功能名稱,方便我們在做 IO 控制時使用。
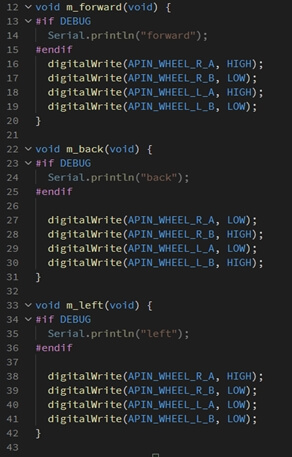
此外我們也將每個小車的動作,例如前進、後退、左轉、右轉等,分別獨立寫成函式 function,後續在呼叫與閱讀上可以更為簡潔。完成各馬達的驅動函式後就接著要處理 ESP32 與 ATmeag328 之間 UART 溝通的程式,以利在使用者按下網頁上的按鈕時,可以立即做出對應的動作控制。
5. 串列埠溝通 UART Communication
ESP32 和 ATmega328 之間藉由序列埠 UART 相互連接,在此範例中,當我們操作網頁上的按鈕時,ESP32 就會收到事件觸發,並且將所要執行的動作(如前進、後退)傳送給 ATmega328,ATmega328 在收到對應的指令後,便會去執行相應的動作。
聰明如你應該不難想到,我們只要設計好前進、後退這些動作的對應的指令碼,在 ESP32 這一邊送出,ATmega328 這一邊接收並且判斷,即可完成這些功能了。沒有錯喔!概念即是如此而已,但我們在範例程式碼當中為了尋求程式碼的簡潔與擴充性,使用指令清單的程式技法來處理這個問題。
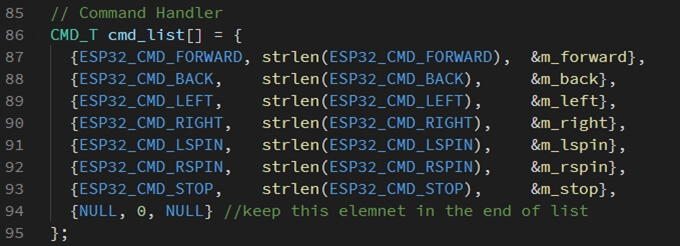
在 ATmega328 的程式碼第 86~95 行之間,可以看到這裡有個 CMD_T 結構的陣列,每個陣列中的成員就是一個指令以及要執行的指標函數,並且在最底部塞入一個 {NULL, 0, NULL} 代表已經沒有其他的指令要判斷了。
使用這種陣列的好處,就是我們只要調整這一個陣列的內容,就可以輕鬆的加入或刪除指令,不再需要更動到其他的程式敘述句,程式也可以看起來更加簡潔與容易閱讀喔!
六、小結
Pixel:Bit 有相容 micro:bit 的連接器,這樣的設計可以任意的搭配所有 micro:bit 擴充套件,同時結合自身的攝影鏡頭與 TFT 顯示螢幕等,打造更多的創意想像空間。
本篇教學示範 Pixel:Bit 搭配登月小車做出手機遙控車,各位夥伴們也可以額外增加在網頁控制的功能,例如:全彩 LED 控制、顏色感測器、蜂鳴器等。更多不同的可能性就讓各位玩家們自由發揮創意吧!
如果各位喜歡我們分享的內容的話,別忘了定期追蹤與支持我們,讓我們更有動力分享更多好玩又實用的教學文章給各位喔!下次見~
若您有 Pixel:Bit 研習的需求,歡迎填寫表單,日後有相關課程資訊將在第一時間通知您!