一、前言
這是一個針對自走車主題,所撰寫的系列教學文章。主要是給支持我們 iCShop X CIRCUS Pi 的廣大朋友撰寫的基礎教學文,近期發現很多朋友或學生想開始學習 Arduino,下載了官方的 Arduino IDE 後,試著照查詢到的教學網站或是觀看 YouTube 學習,但使用起來好像沒有想像中的簡單,所以入坑的有點吃力。
這個系列我們將針對「自走車」這一個非常輕鬆有趣的主題,透過大家都可以取得的免費資源來體驗撰寫程式的有趣之處。
不管您想製作循線的自走車,還是避障的自走車,或是認為只有小孩才做選擇,我全都要的!只要跟著文章一步步操作,理解過程與程式邏輯,您也可以客製化自己的自走車功能。
二、事前作業
首先您需要組成自走車的相關配件與零件,配置相當常見也平價,大致上需要的東西如下:
1. 主控板:Arduino UNO (不管是正版、相容版、加強版、霹靂無敵酷炫版……都可以,只有壞掉的不行XD)
2. 擴充板:Arduino Sensor Shield V5.0 (為了方便連接感測器或是馬達與電源使用)
3. 馬達驅動:L9110 或L9110S(有沒有加這個 S 都無所謂)
4. 自走車車架(馬達、輪子、螺絲螺帽、銅柱、壓克力車板……等)
5. 傳資料用的USB Type B to Type A傳輸線、電池與杜邦連接線……之類的。
如果您不想要這麼麻煩一個一個搜尋,可以直接依照您的需求,到 iCShop 選擇我們配置好的套件包,分為「循線自走車」與「循線避障自走車」,本篇教學也會使用這些套件包。
三、開始組裝
1. 首先準備相關工具
b. 剝線鉗 – 主要用來剝線與裁線,高手可直接用斜口鉗或打火機配指甲。
c. 一字起子 – 不宜過大,有些地方需要一字才能使用,無法被單獨的十字起子取代。

2. 焊接馬達與加強線端
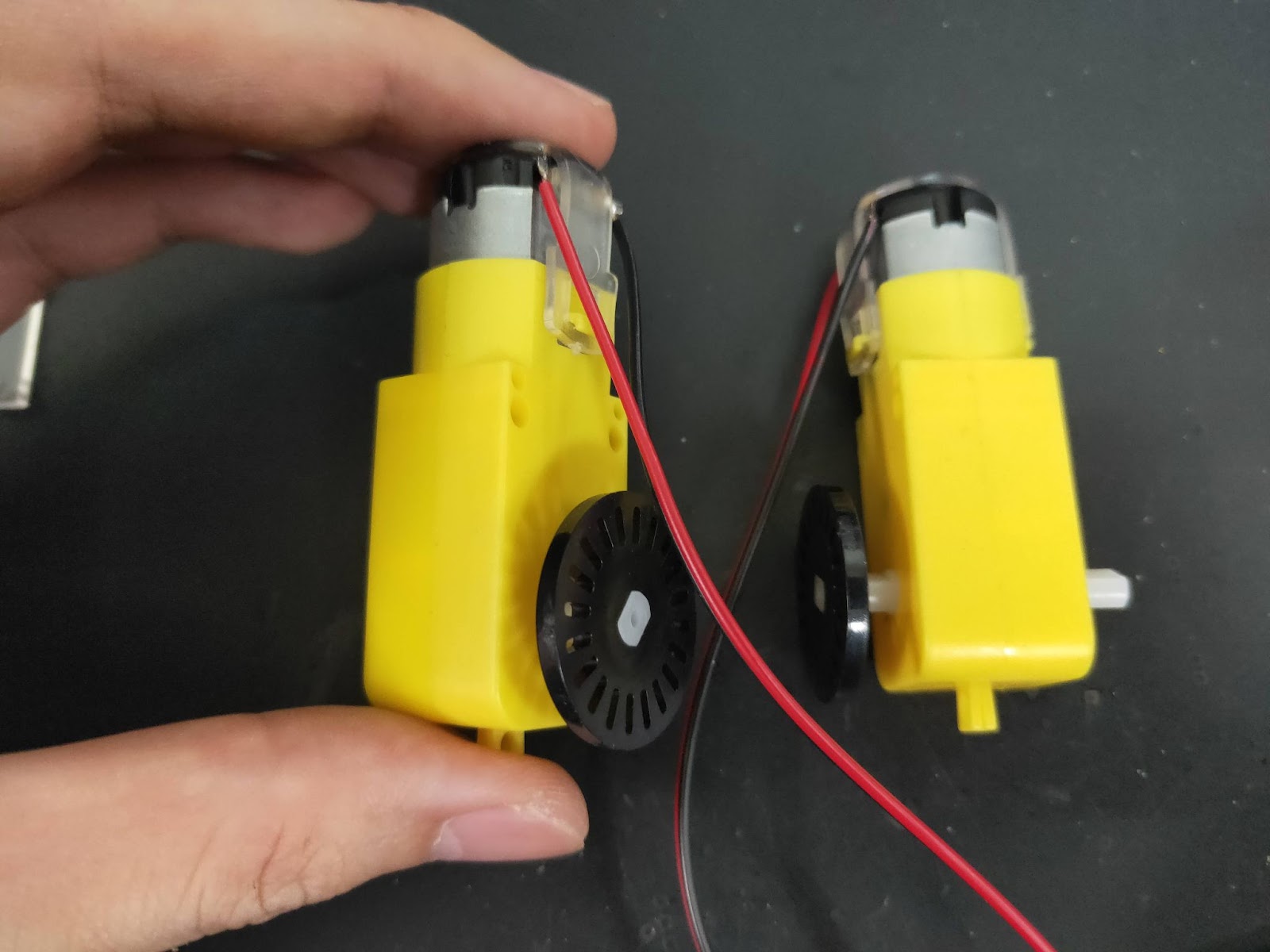
a. 準備如下圖所示材料,應該都會在自走車底盤套件內。

b. 使用電烙鐵與焊錫將連接線焊在馬達上。
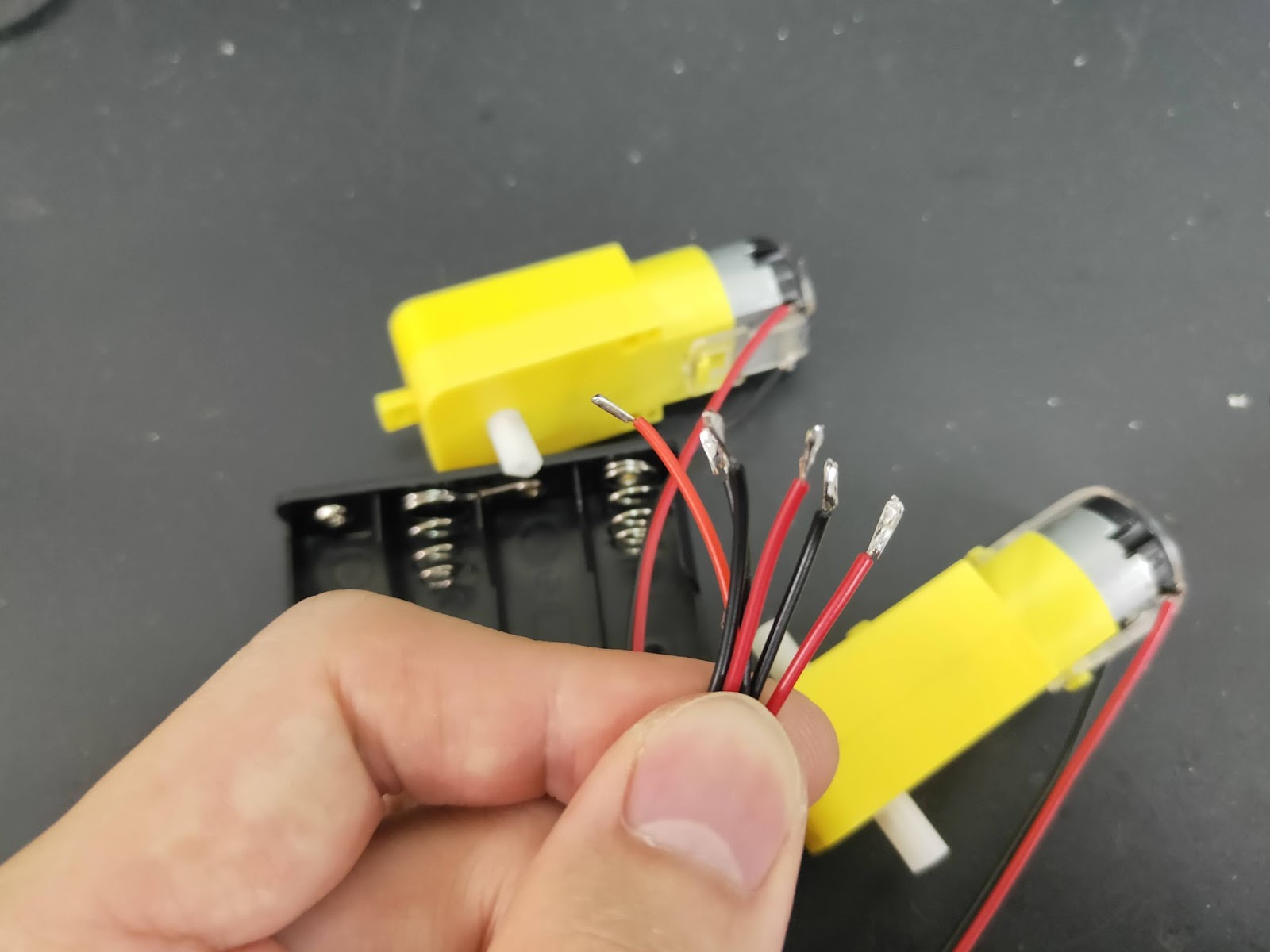
c. 用剝線鉗將兩個馬達的連接線端剝出更多的銅線,電池盒的連接線端也是。
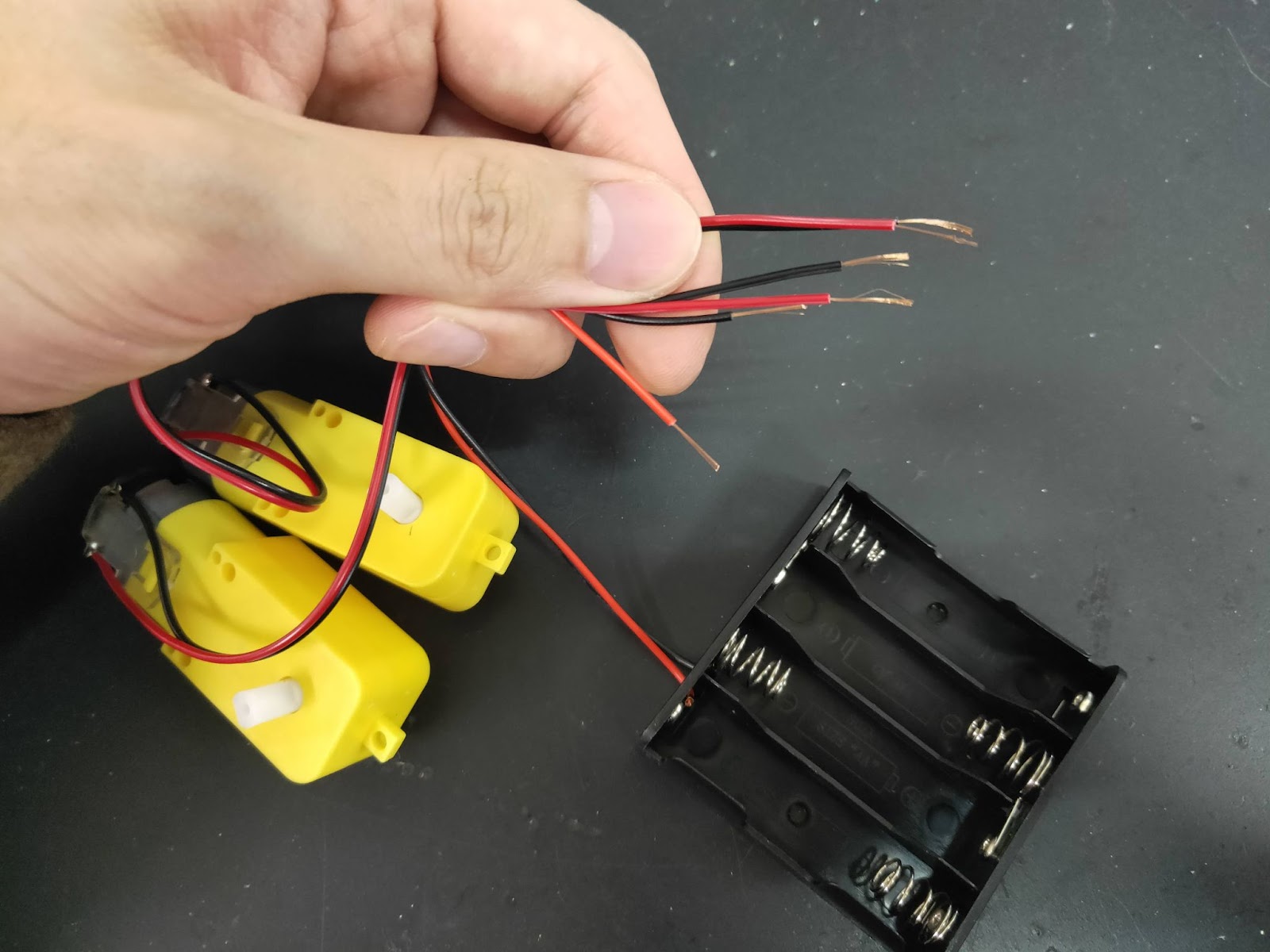
d. 將銅線對折並用電烙鐵塗上焊錫,這一步主要是增厚線端,讓之後鎖在模組接點時較不易鬆脫。
3. 剝除車板保護紙與安裝輔助輪
a. 準備車板與安裝馬達用的 T 字板,在自走車底盤套件內。
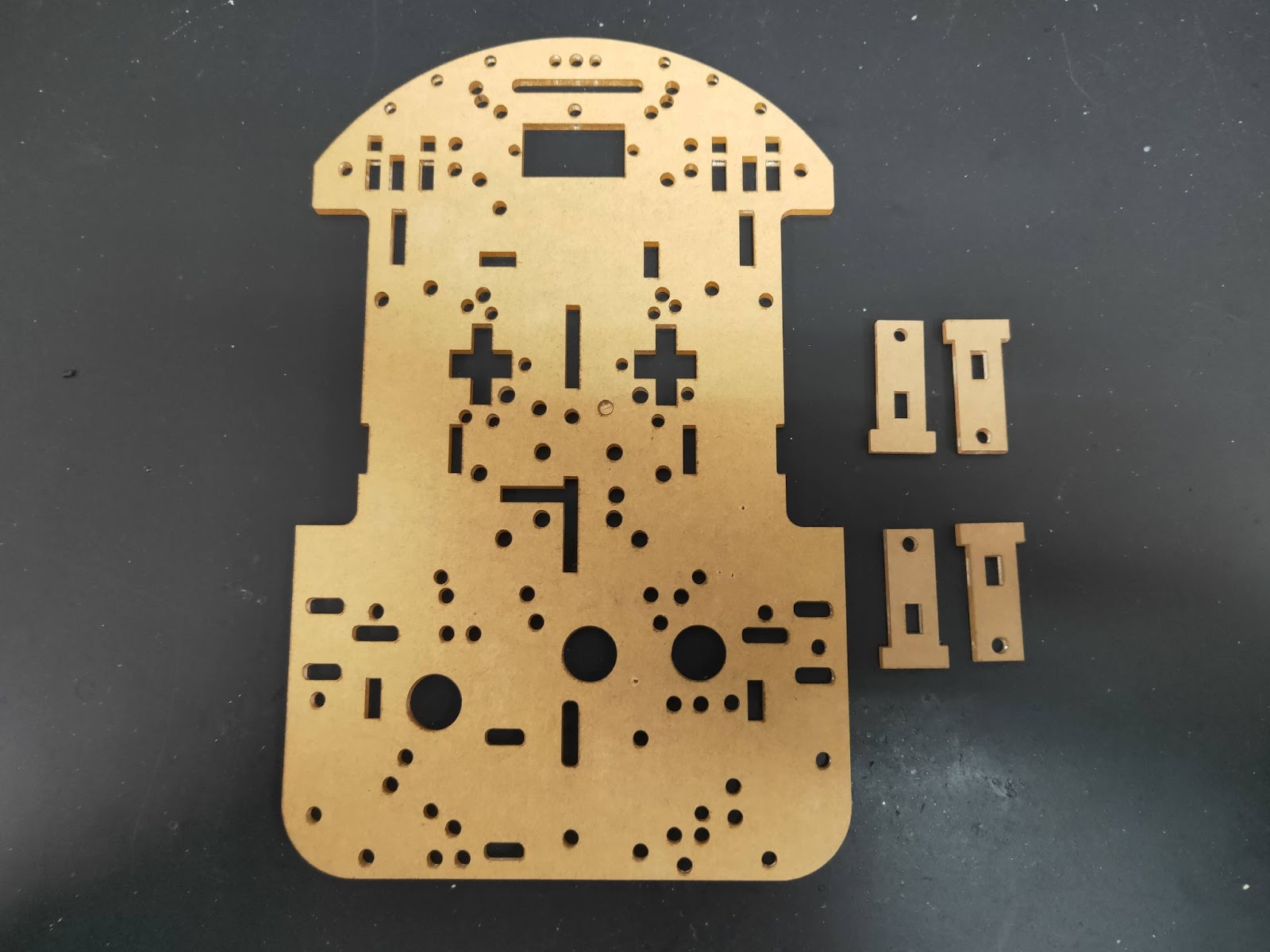
b. 將保護紙撕下,並準備自走車底盤套件內附最多的「M3螺絲 x4」與「M3螺帽 x4」。
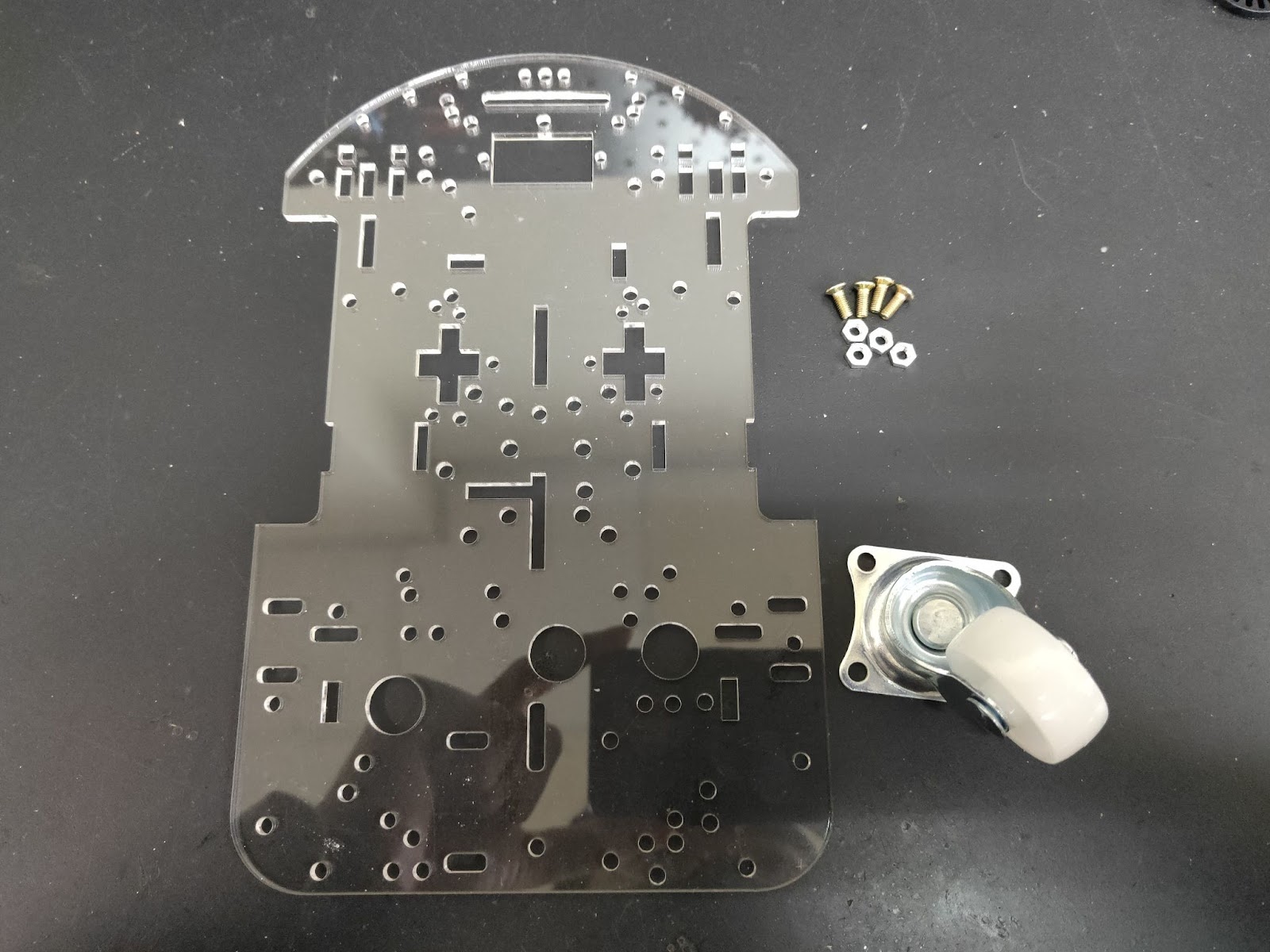
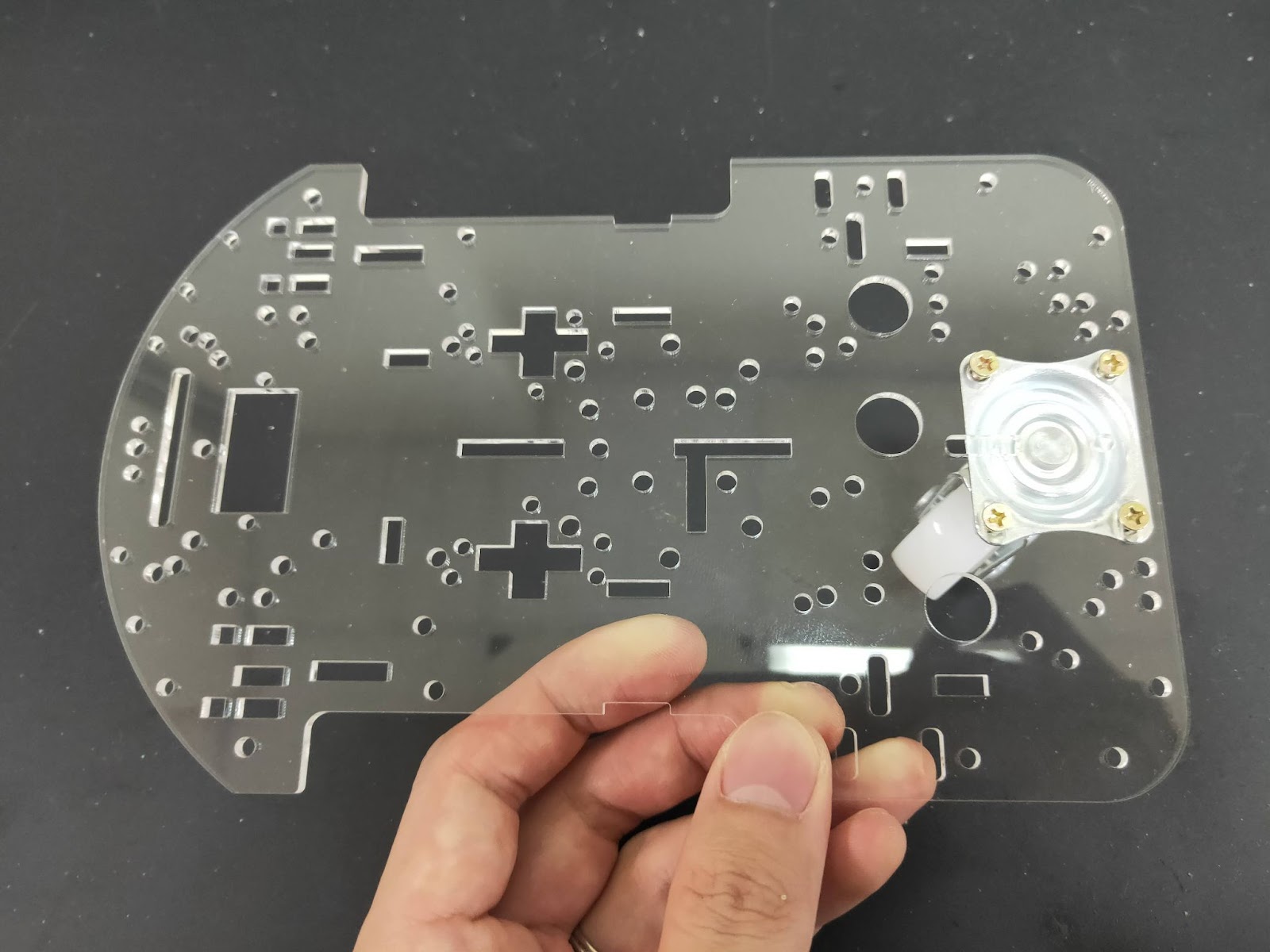
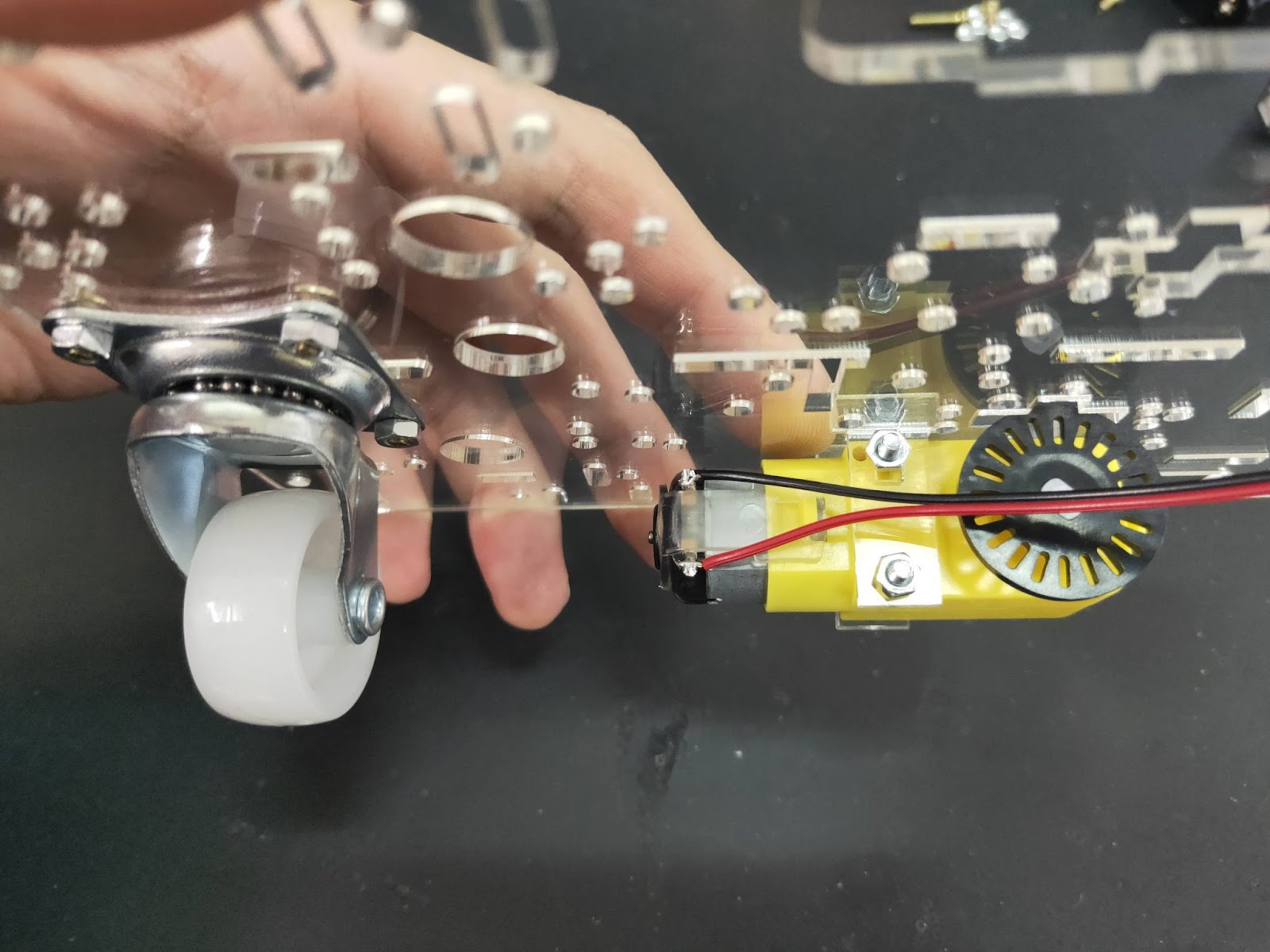
c. 請觀察下圖車板孔洞位置安裝輔助輪,車板上的「孔洞並不是對稱的」,請仔細觀察是否與下圖相同再使用一字螺絲起子進行安裝,螺絲是由車板穿入再到輔助輪,並用螺帽在另一端固定。
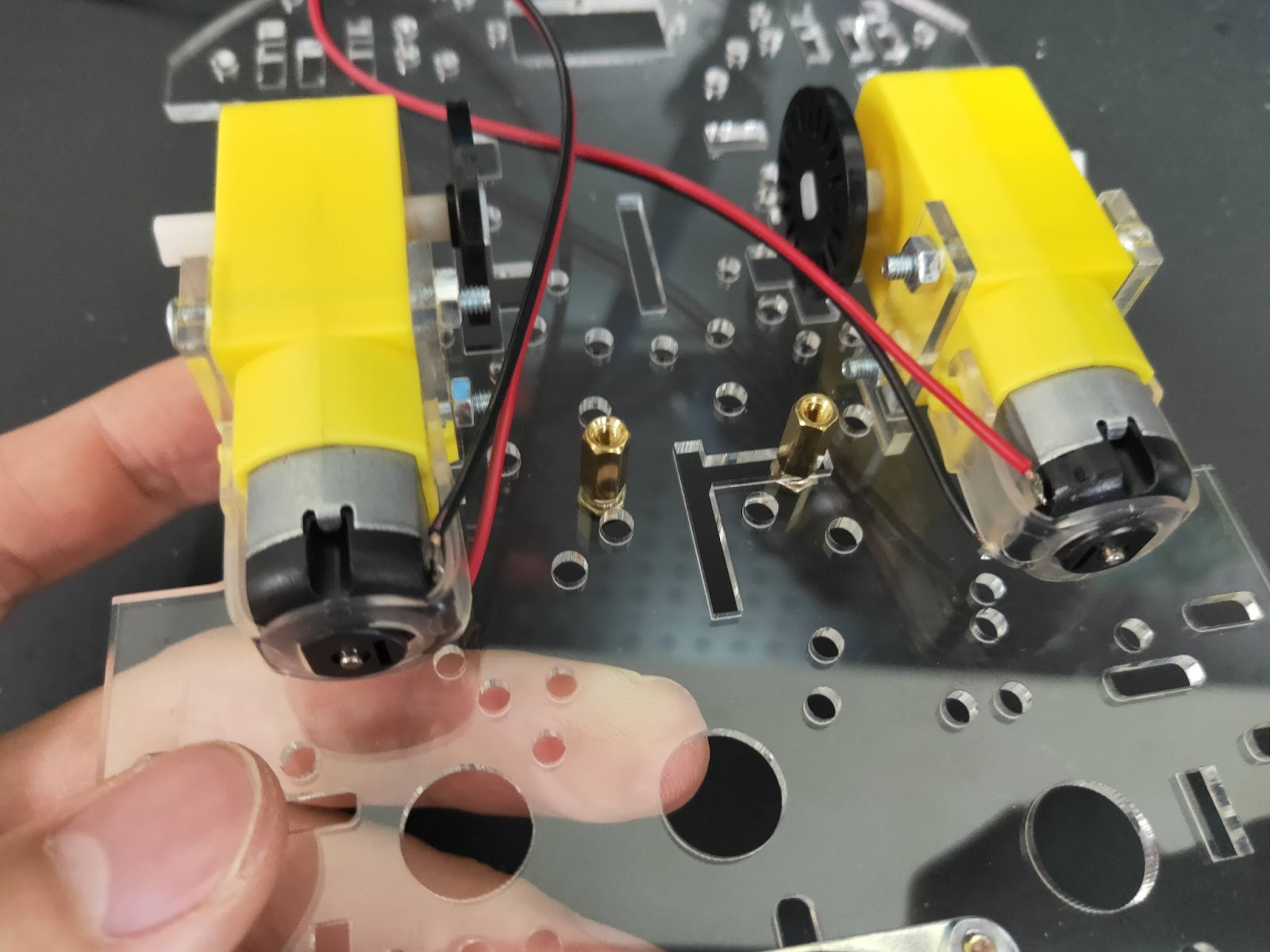
4. 安裝編碼盤與直流馬達
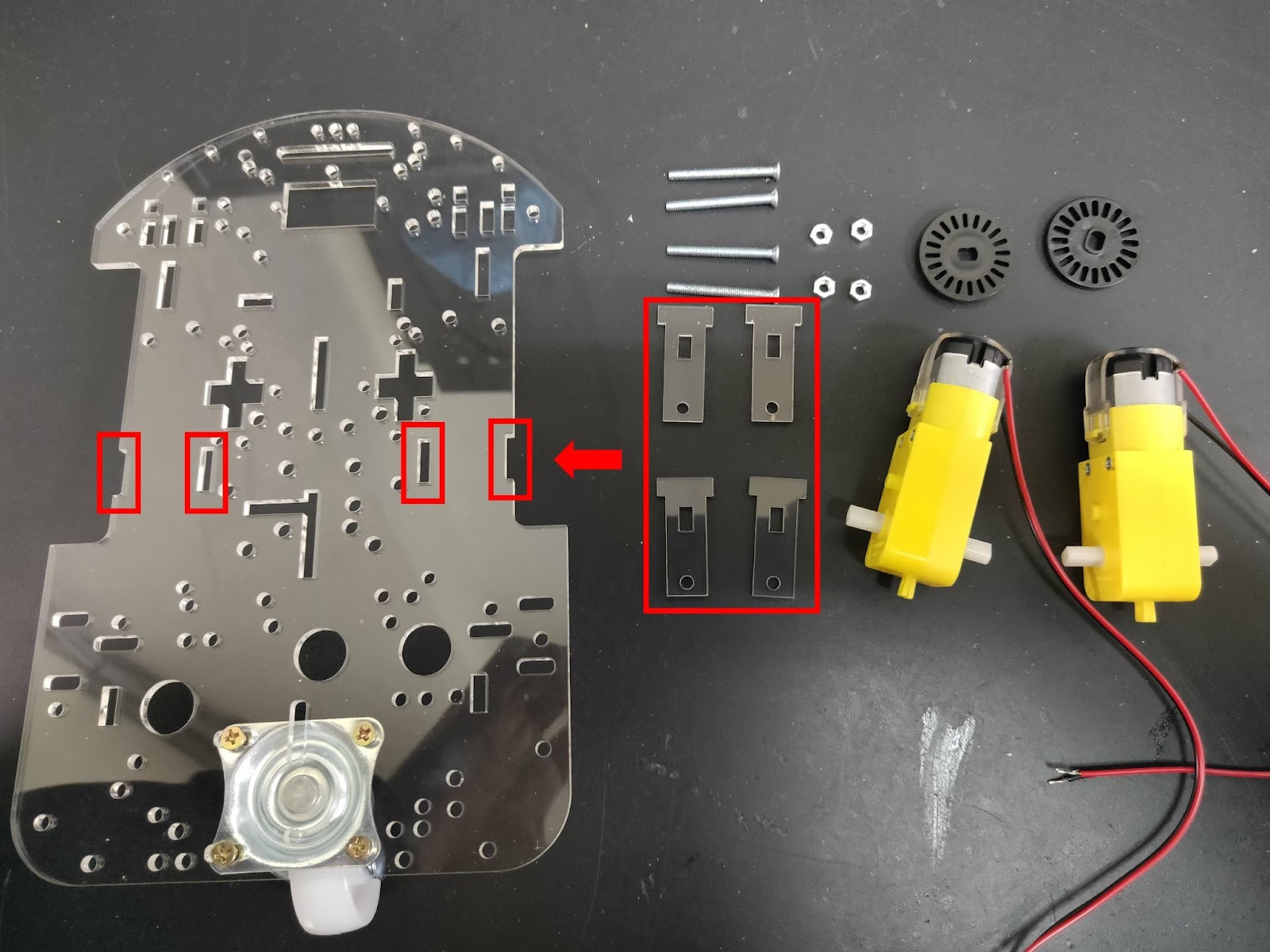
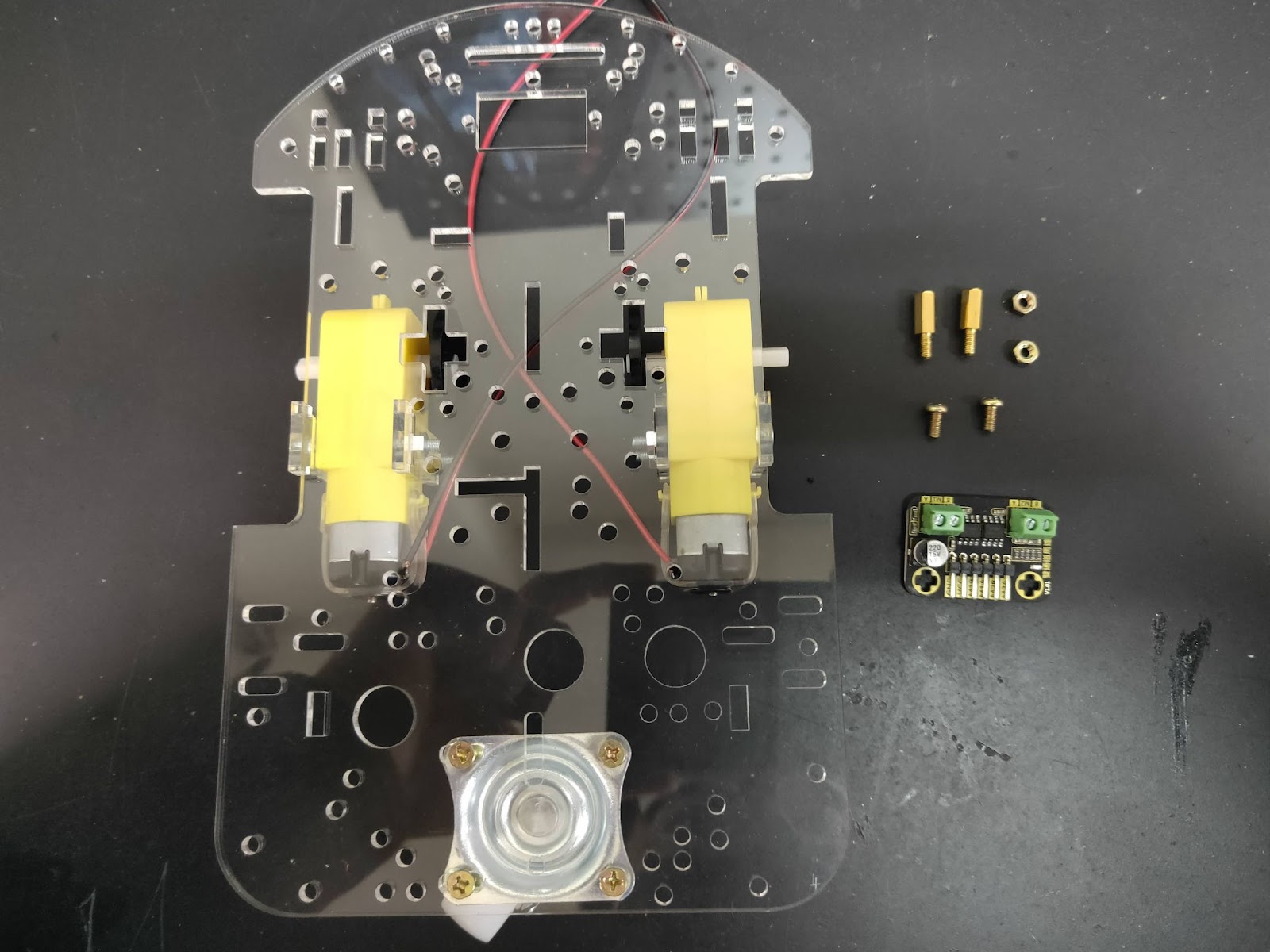
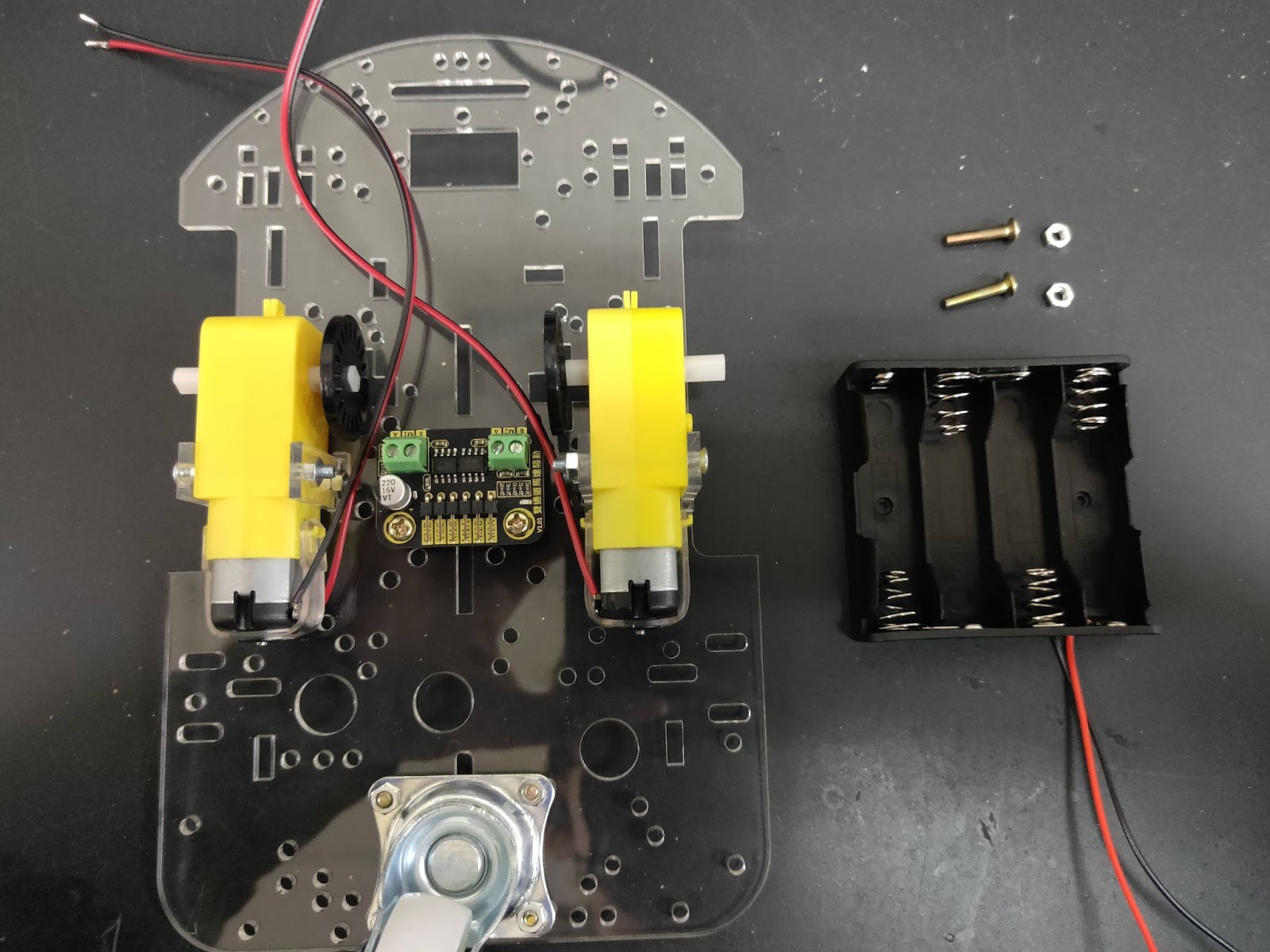
a. 準備如下圖的零件,除了剛剛的車架,還有自走車底盤套件內附的「M3螺絲(3cm) x4」、「M3螺帽 x4」、「碼盤 x2」與剛剛焊接好的馬達 x2。
紅框是待會安裝「馬達固定用 T 字板」的位置,每個馬達會使用兩個 T 字板,並搭配螺絲螺帽夾住固定。
b. 首先將「編碼盤」安裝在馬達上面,位置在連接線那一側。
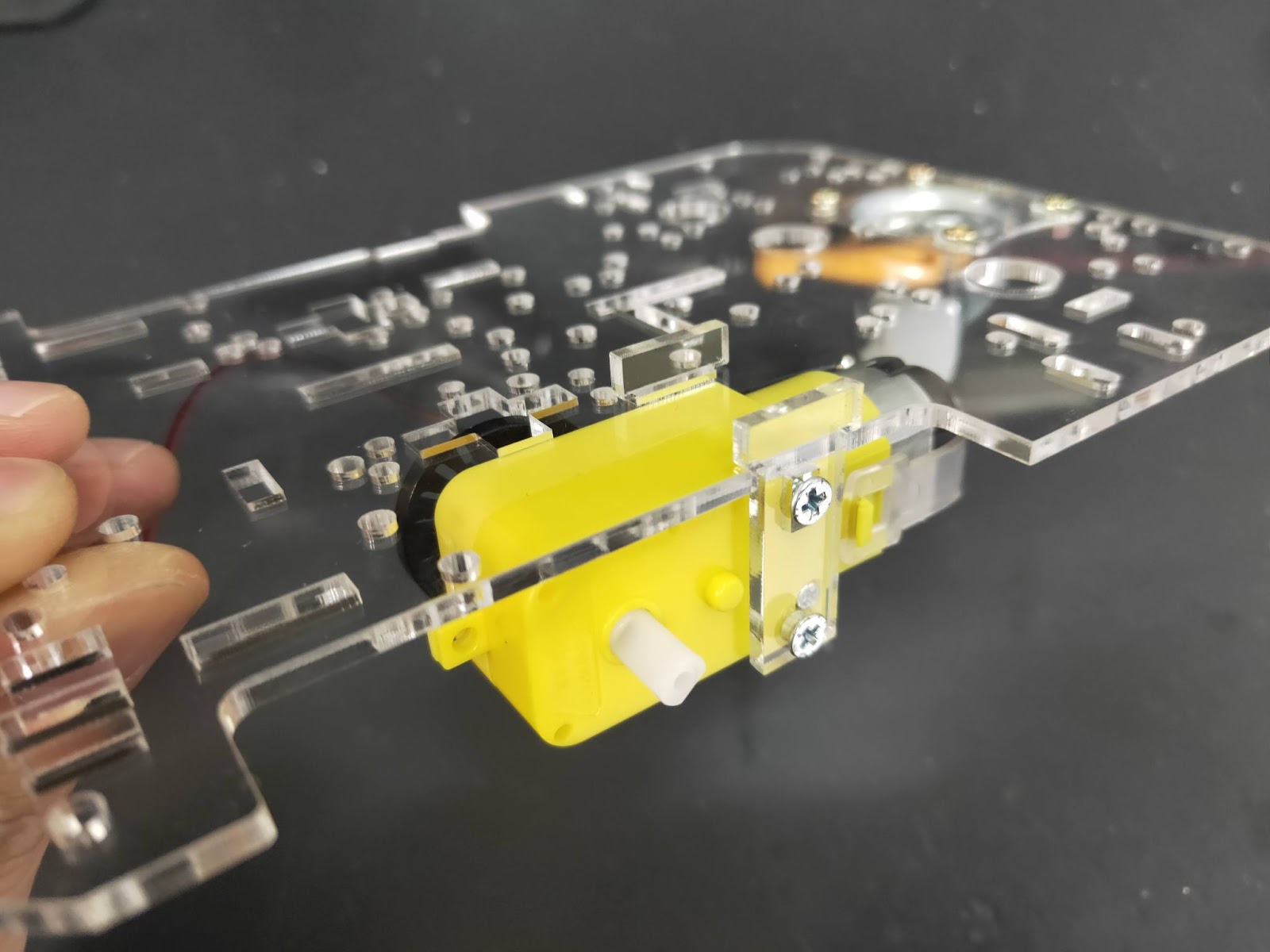
c. 拿出「T 字板」依照剛剛指示的位置從上方插入,將馬達依照下圖方向置於下方,螺絲由外側插入穿過 T 字板→直流馬達→ T 字板,內側由螺帽固定(儘量讓靠近車板的螺帽平邊平貼在壓克力板上)。
小提醒
因為是用夾住的方式固定,不宜將螺絲鎖太緊,會使馬達塑膠齒輪箱變形(黃色的部份),導致內部轉動不順。
d. 由另一側觀看的話如下圖所示,注意馬達安裝方向。
5. 安裝直流馬達驅動板
a. 準備「馬達驅動板」、架高用的「銅柱 x2」、「M3 x8mm 螺絲」與「M3螺帽」。
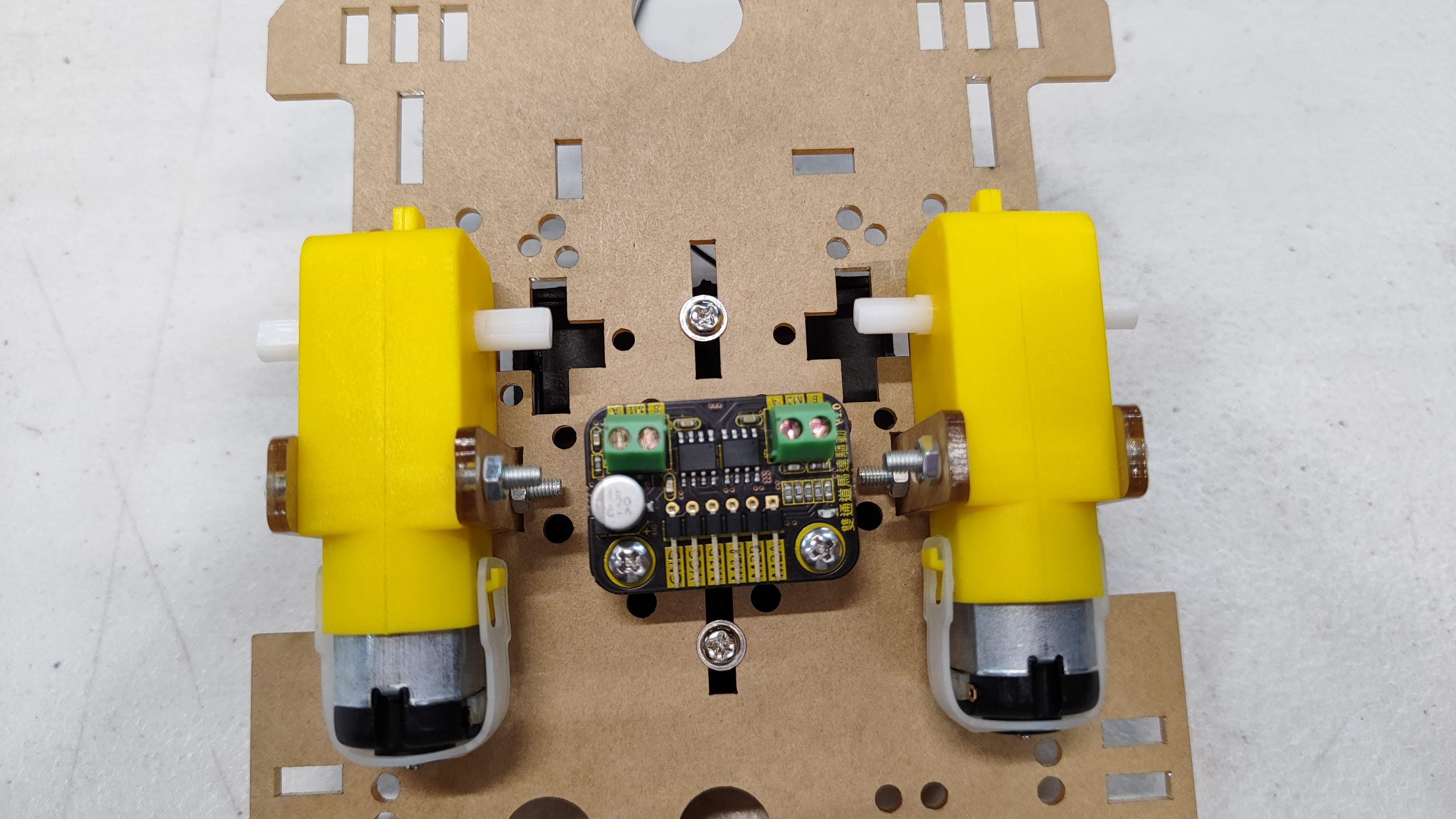
b. 馬達驅動板是安裝在底部,置於兩個馬達中間,位置如下圖所示,請先使用銅柱搭配螺帽固定,一個在橫向溝槽上,一個在隔壁的孔洞上,銅柱穿過車板後另一側由螺帽固定。
c. 接著將馬達驅動板如下圖方向放置在銅柱上,並使用螺絲固定。
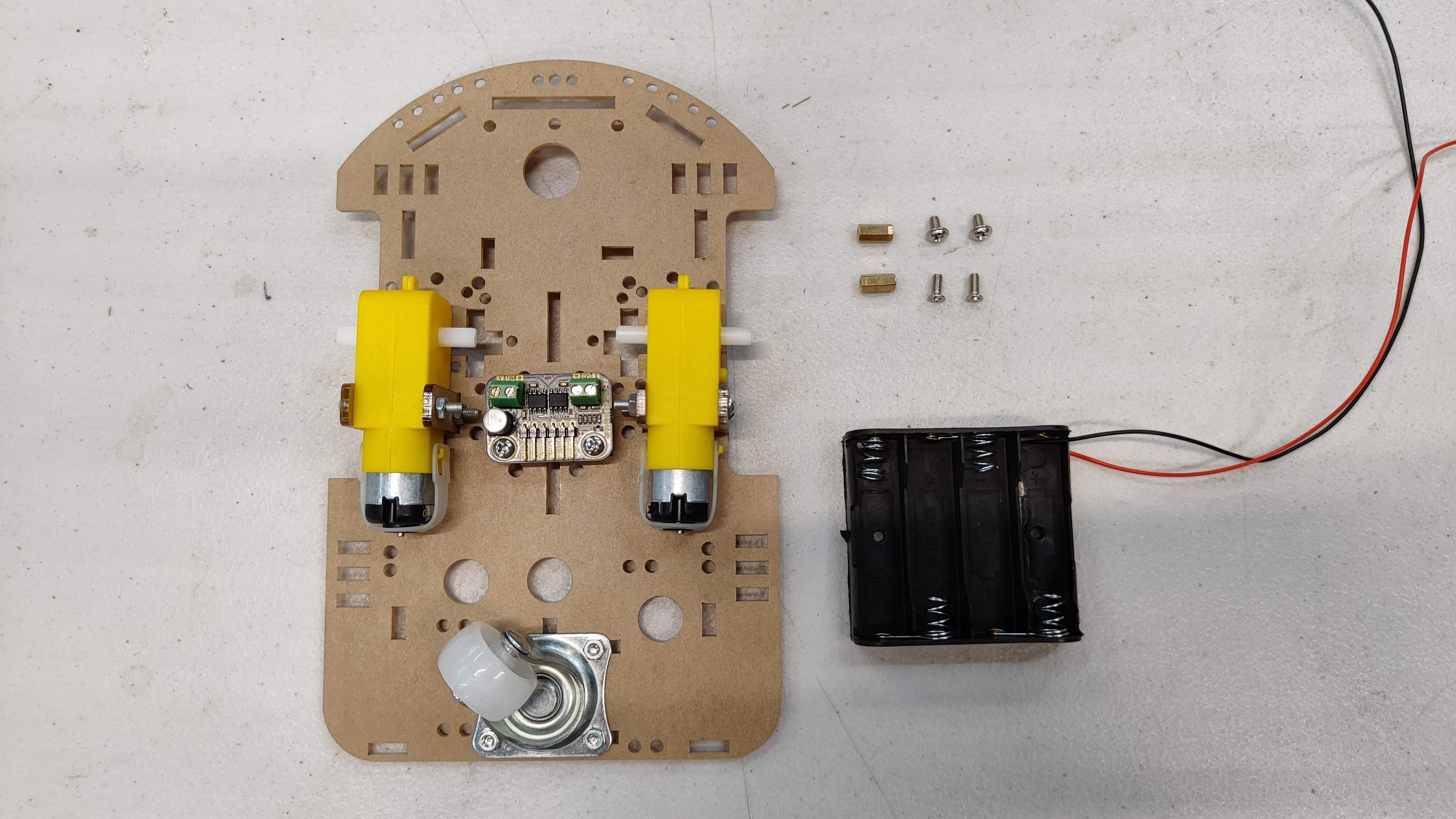
6. 安裝電池盒(新20240112)
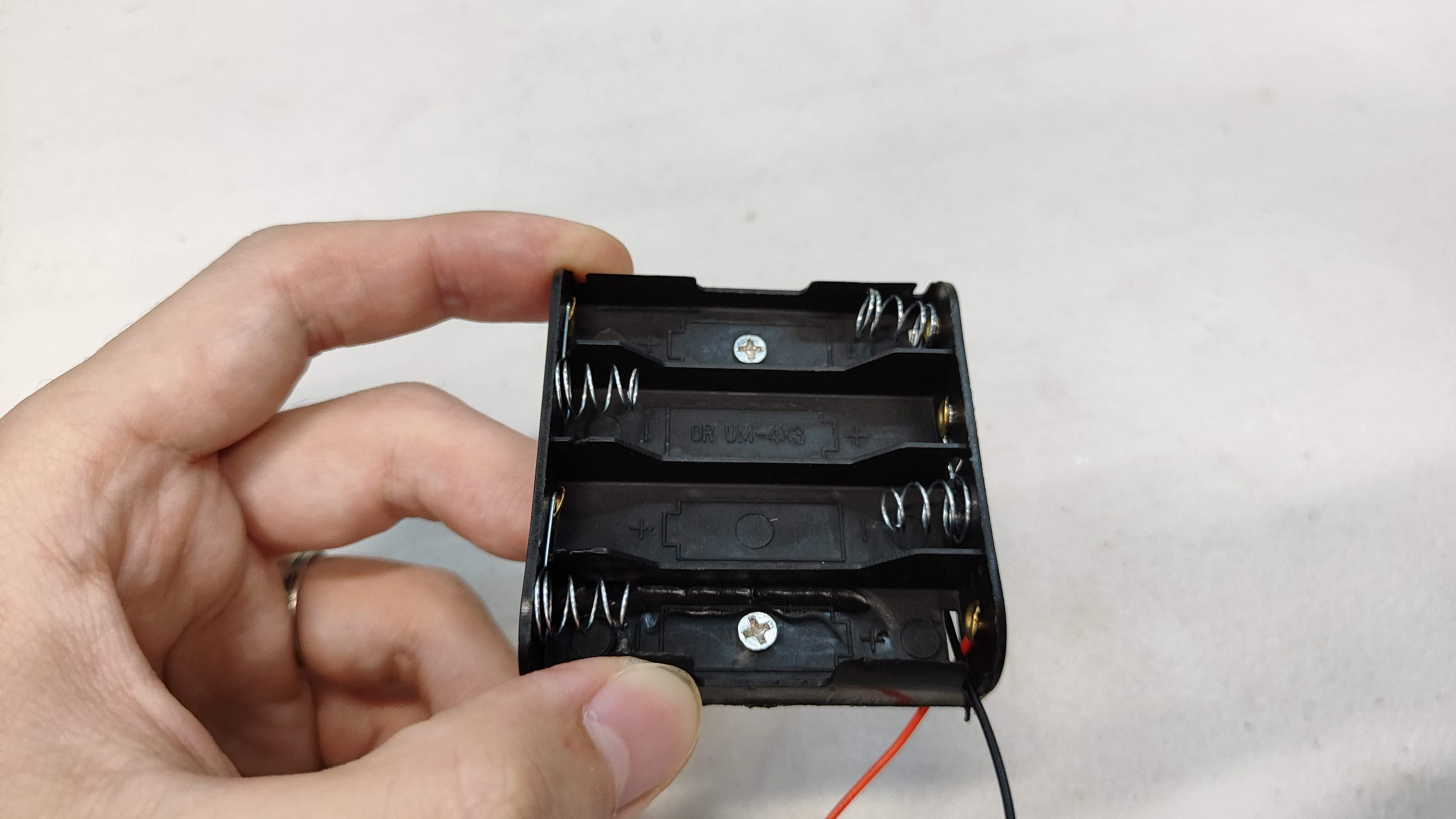
a. 準備自走車底盤套件內的「電池盒(線段末端已在第二步驟加上焊錫)」、「平頭螺絲x2」、「M3螺絲x2」,還有「雙母銅柱x2」。
b. 首先將平頭螺絲「從安裝電池那一面穿過」電池盒,另一面安裝上雙母銅柱。
若您有加購18650 2節電池盒(附蓋帶開關) DC 電源頭5.5*2.1mm,請跳過這個步驟。

c. 將電池盒放置在安裝馬達那一面的背面,如下圖對應位置鎖上螺絲固定於車板上。
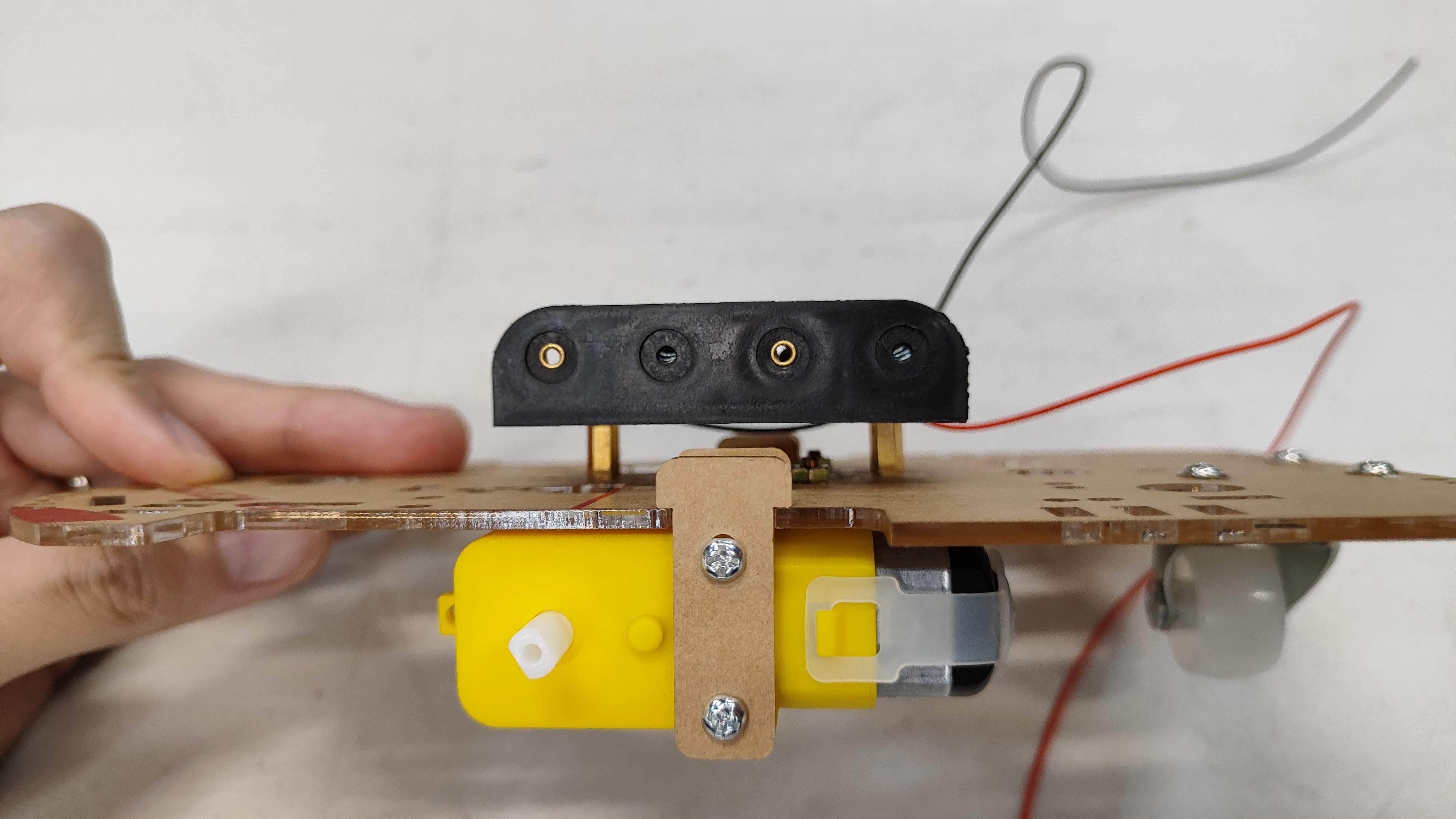
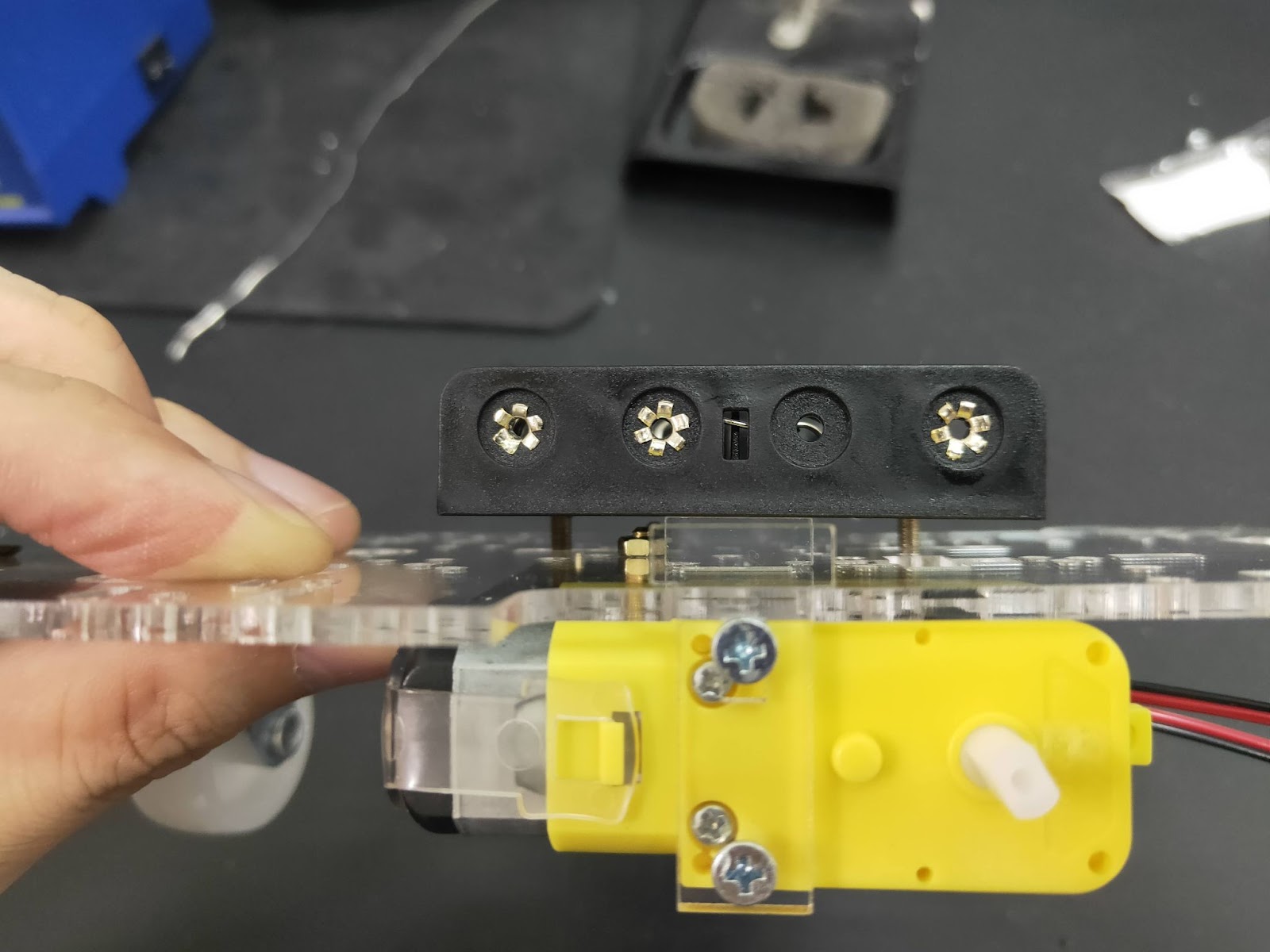
d. 從側邊看的話會是如下圖這樣。
6. 安裝電池盒(舊)
a. 準備自走車底盤套件內的「電池盒(線段末端已在第二步驟加上焊錫)」、平頭螺絲(比用在輔助輪的螺絲更長一點),還有「M3螺帽」。
b. 首先將螺絲「從安裝電池那一面穿過」電池盒,並將電池盒如下圖放置於車板上方。
若您有加購18650 2節電池盒(附蓋帶開關) DC 電源頭5.5*2.1mm,請跳過這個步驟。

c. 由底部這面看,螺絲會巧妙穿過位於馬達驅動板上方與下方的垂直溝槽,請用螺帽固定。
小提醒
因為電池盒並不是完全服貼在車板上,鎖螺絲、螺帽時同樣不宜過多,基本上鎖完兩個螺帽後,電池盒不會過度晃動即可。
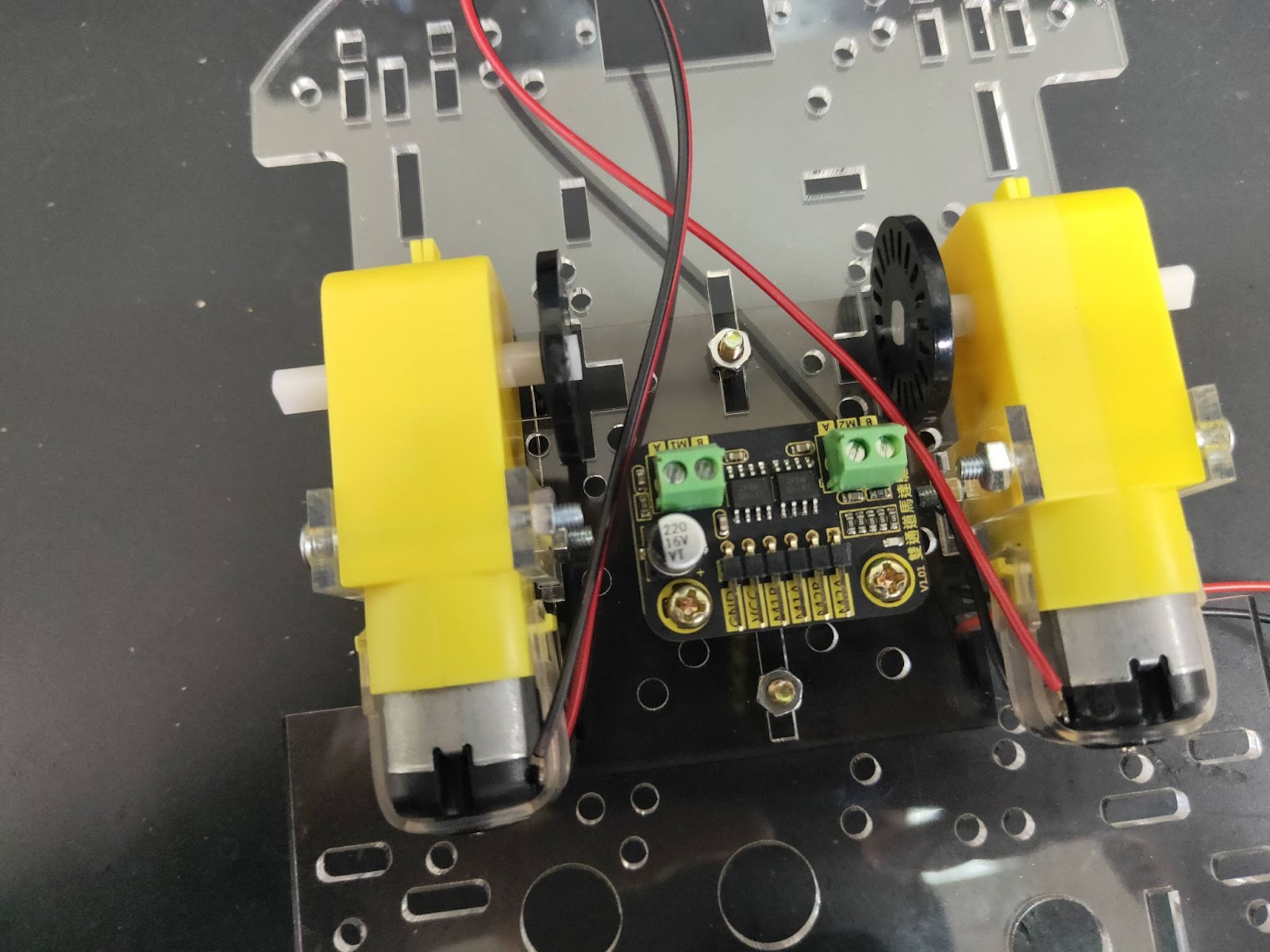
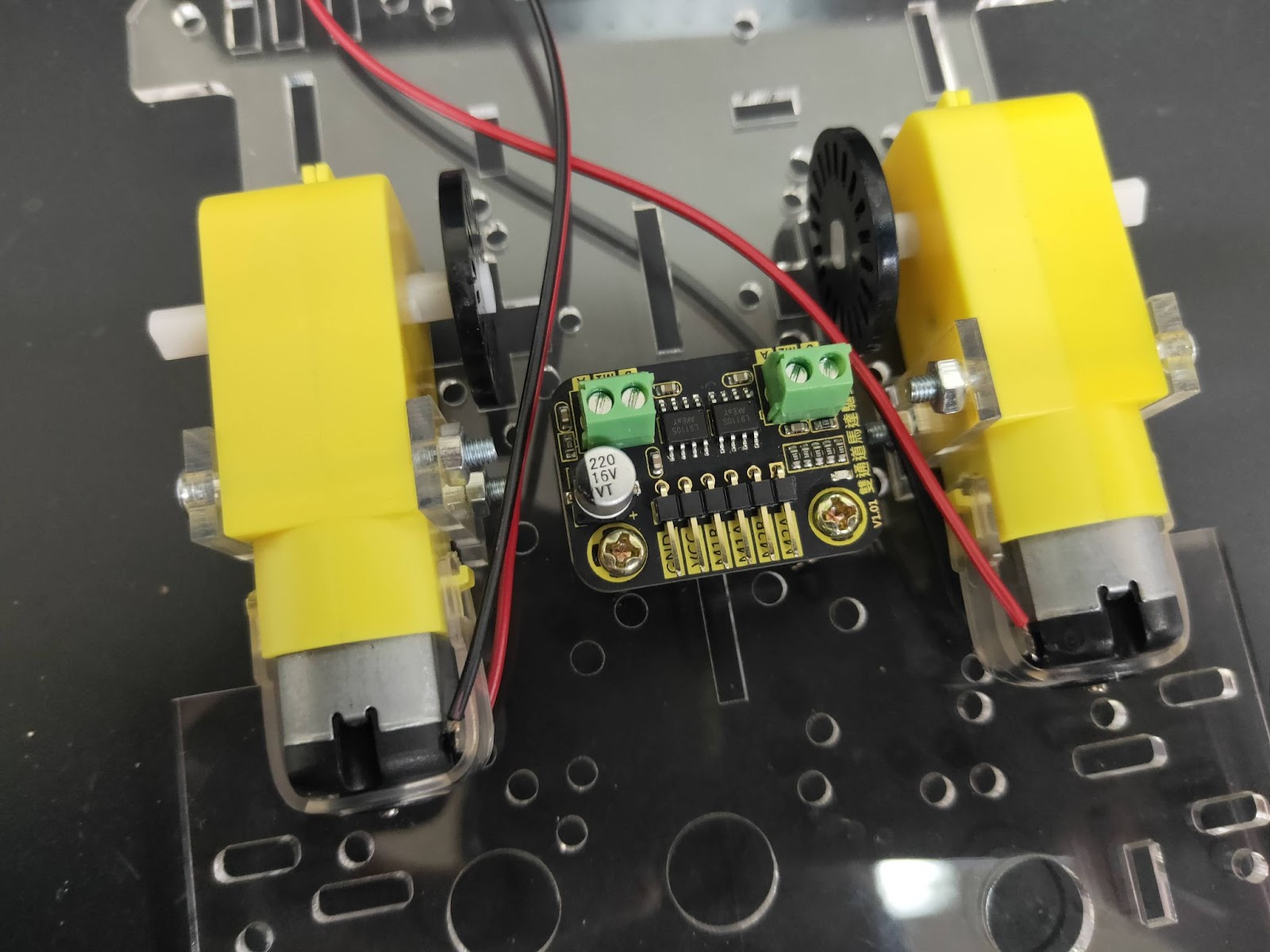
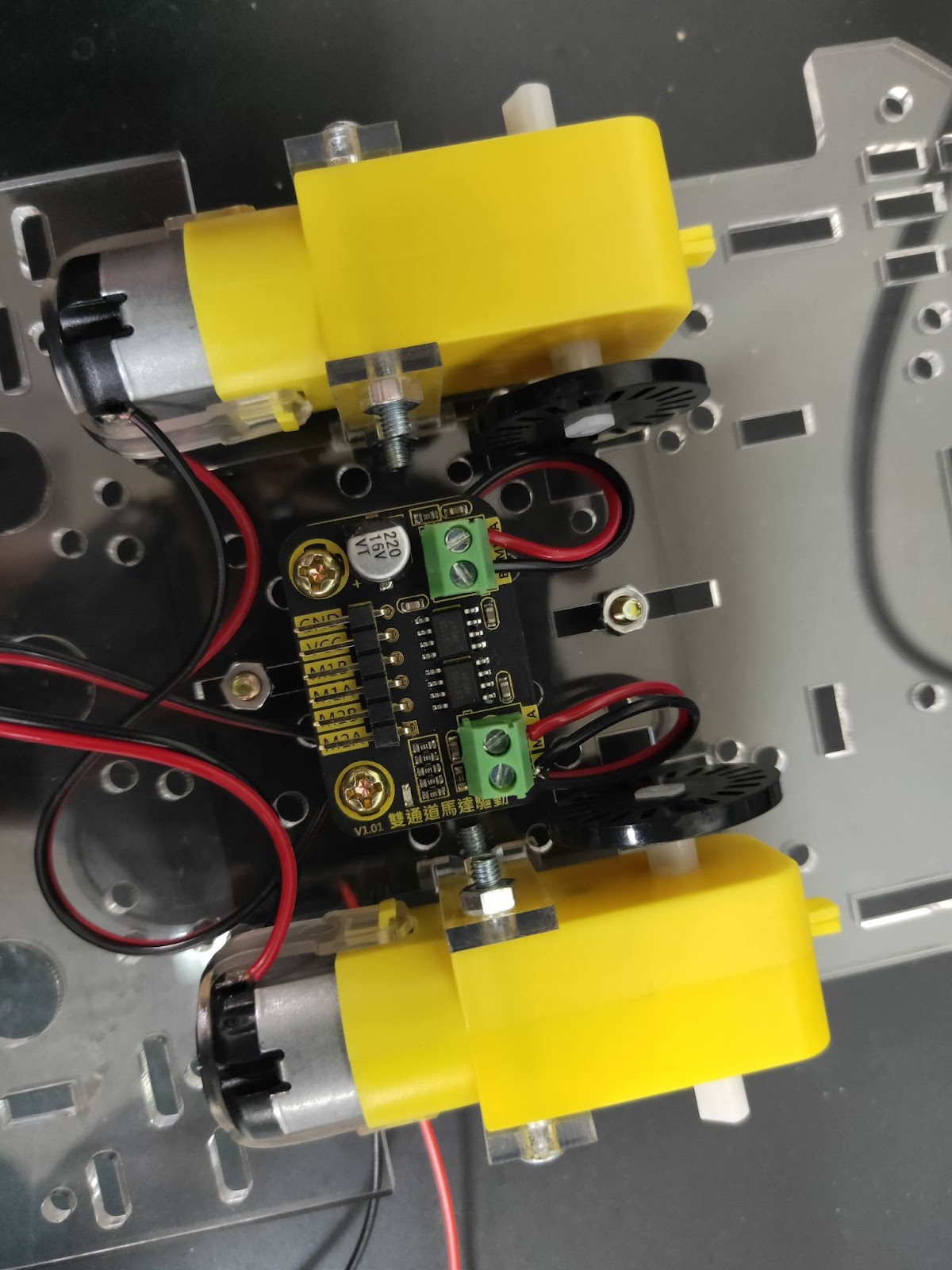
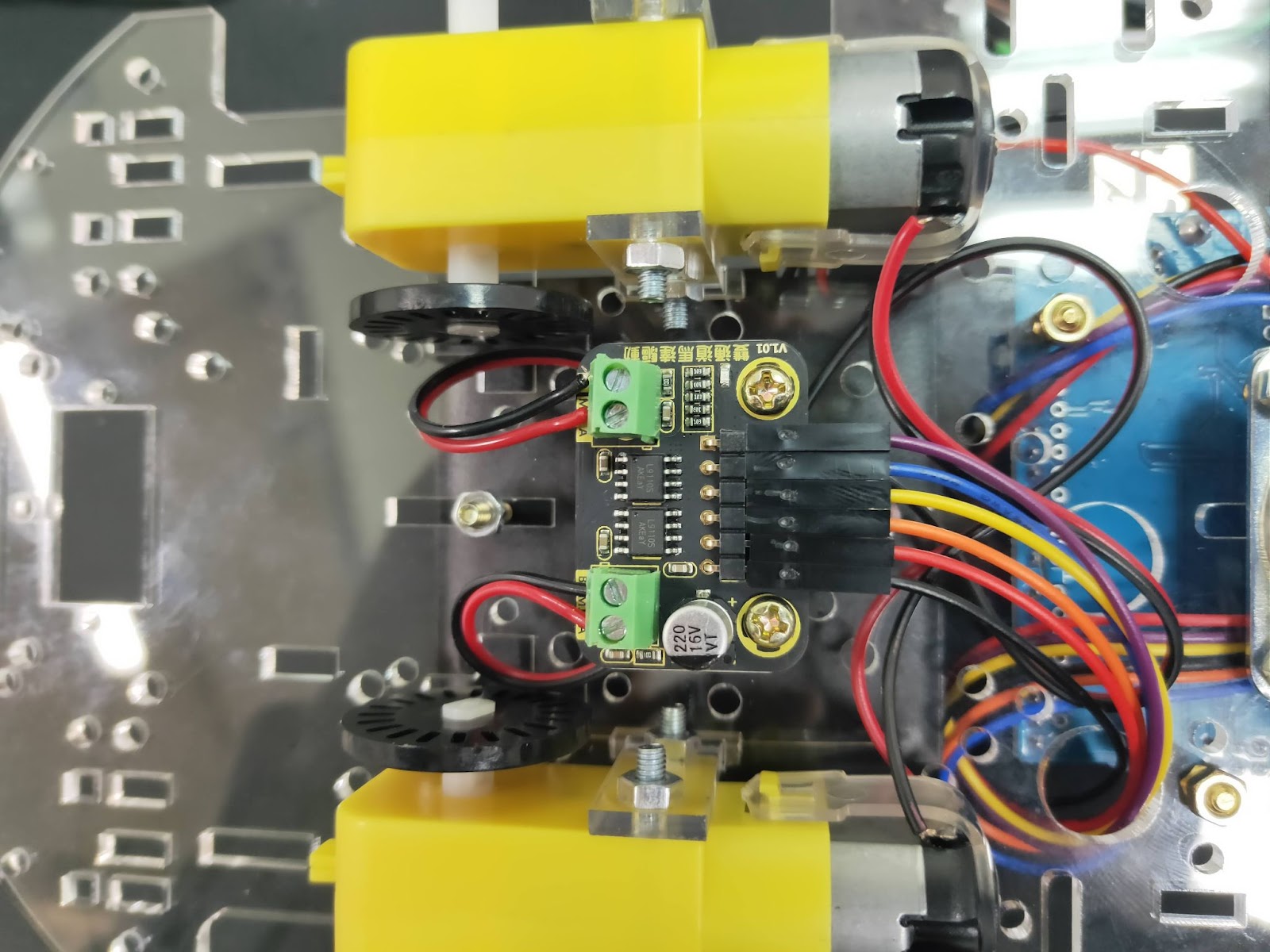
7. 連接馬達連接線到馬達驅動板
將兩顆馬達的連接線,如下圖用螺絲起子安裝到馬達驅動板上,安裝的位置是「綠色的歐式端子座」,裝在最靠近的端子座即可,左邊馬達就裝在左側端子座。
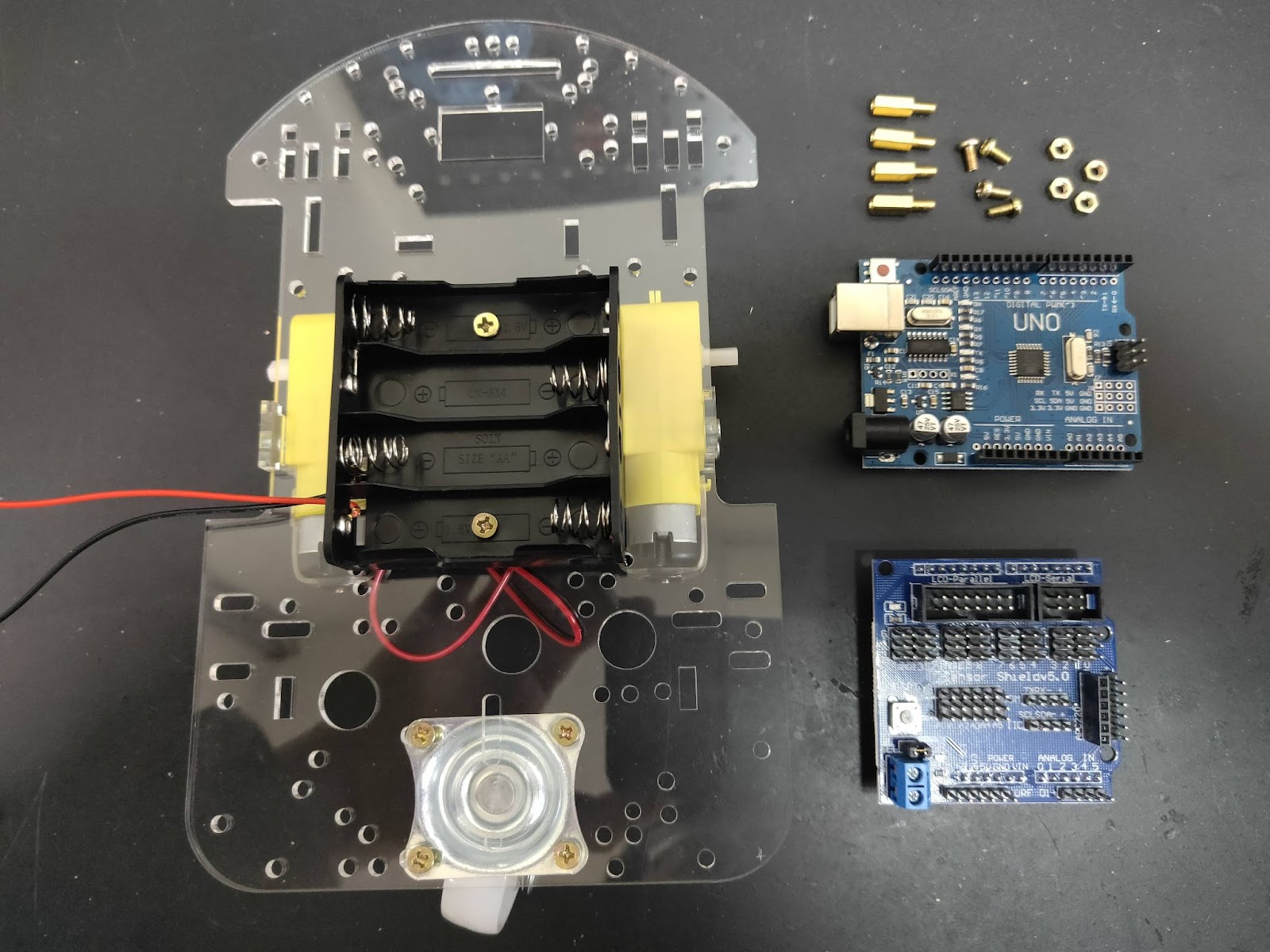
8. 安裝 Arduino UNO 控制板與擴充板
a. 準備 Arduino UNO 控制板與腳位擴充板、架高用「銅柱 x4」、「M3 x8mm 螺絲 x4」與「M3螺帽 x4」。
若您有加購18650 2節電池盒(附蓋帶開關) DC 電源頭5.5*2.1mm,請自備泡棉膠,將它黏貼於下圖電池盒相似的位置。
b. 首先使用銅柱與螺帽,安裝在如下圖所示的位置,銅柱從上方穿過,底部使用螺帽固定。

c. 將 Arduino UNO 控制板依照銅柱與自身孔洞的位置擺放,並用螺絲起子鎖上螺絲固定。
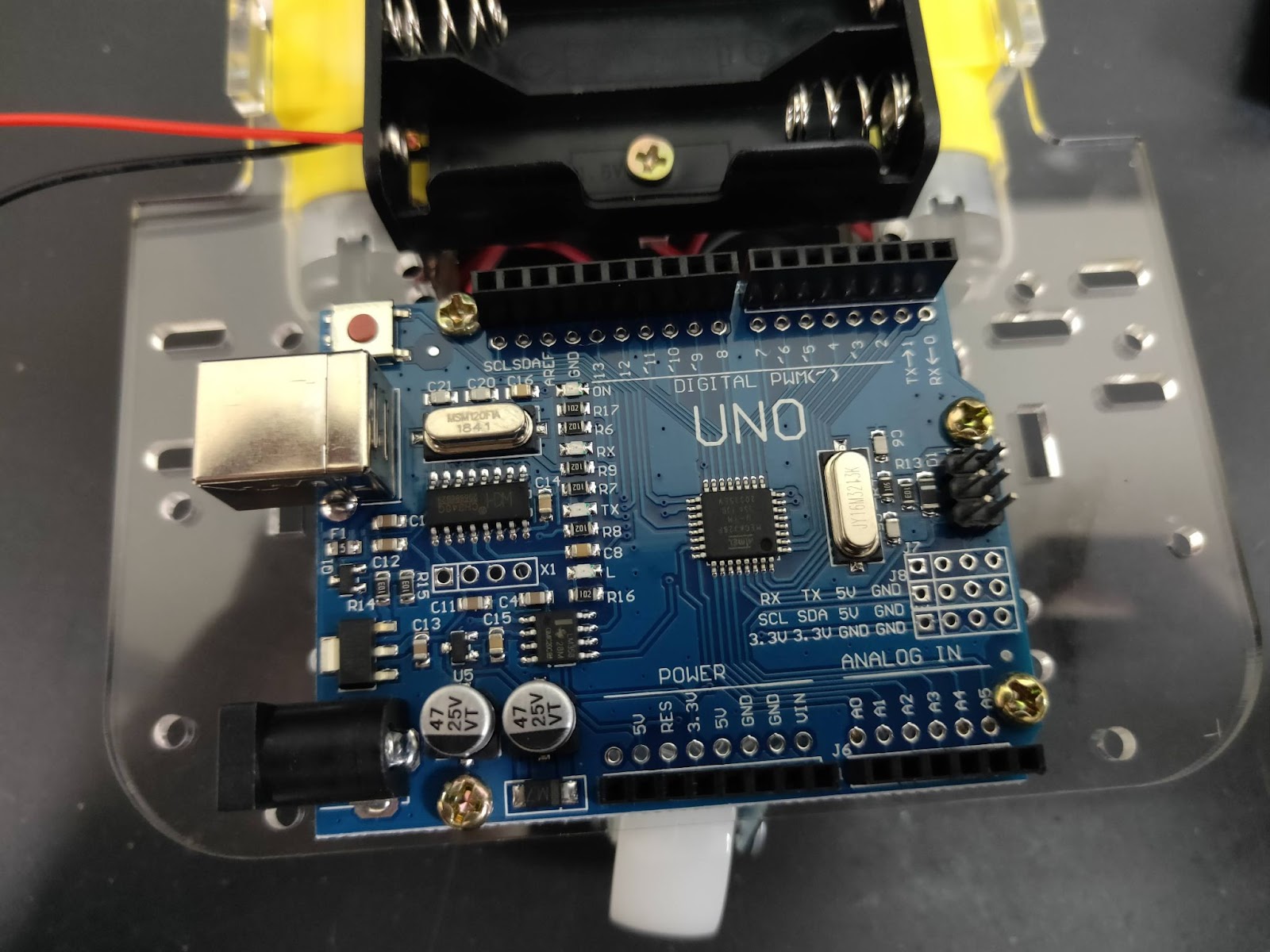
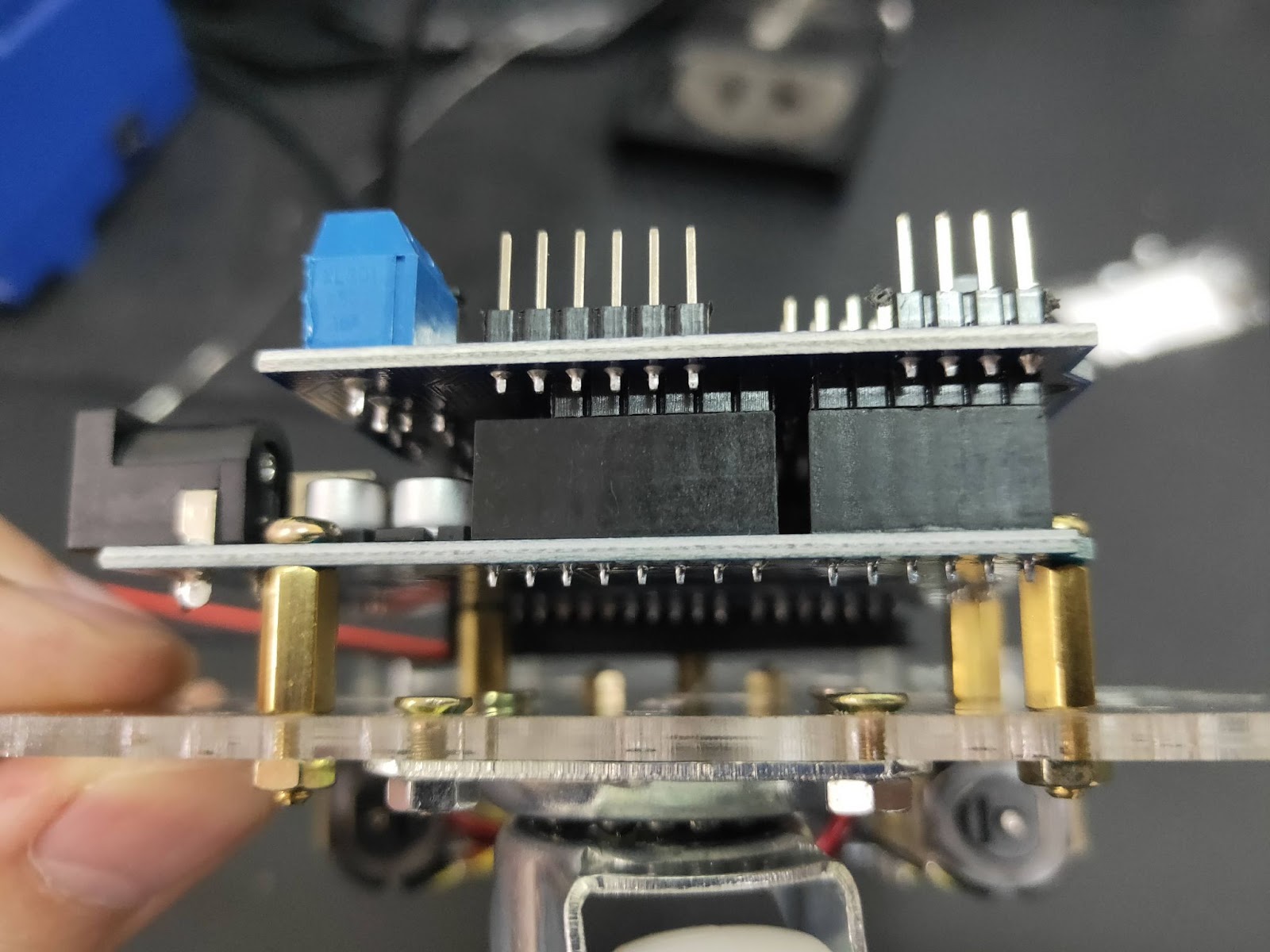
d. 最後將擴充板下方的排針,由右側對齊 Arduino UNO 控制板的排座上,下壓安裝在上面。

e. 檢查一下上下排針是否都安裝在 Arduino UNO 控制板的排座上。
9. 連接電源與馬達驅動控制線
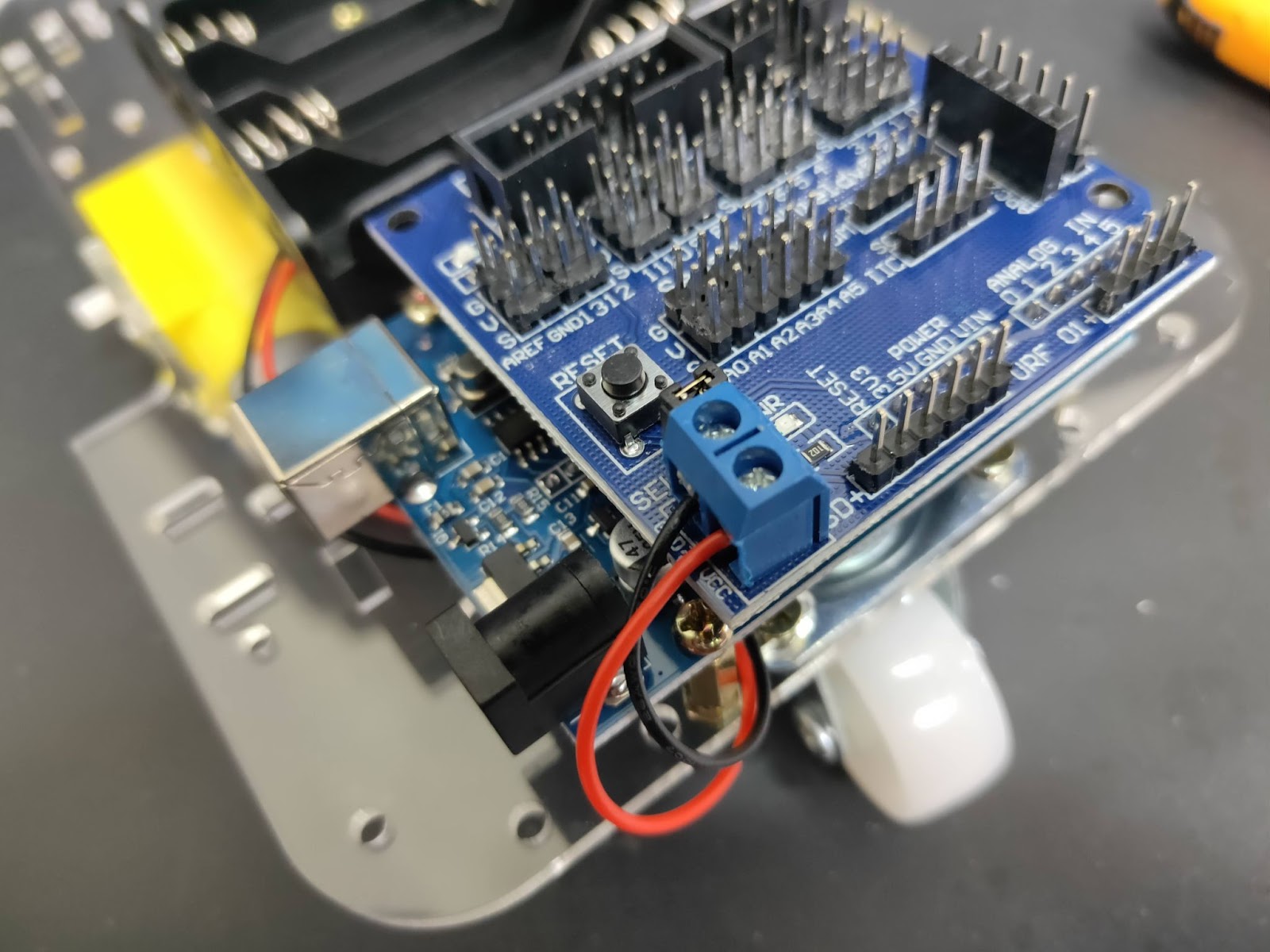
a. 將電池盒的連接線鎖在擴充板上的「藍色歐式端子座」上。
若您有加購18650 2節電池盒(附蓋帶開關) DC 電源頭5.5*2.1mm,請跳過這個步驟。
小提醒
電池有分正負極(紅色線代表正電),請將紅色線鎖在「標示VCC的位置」,黑色線則在GND的位置。
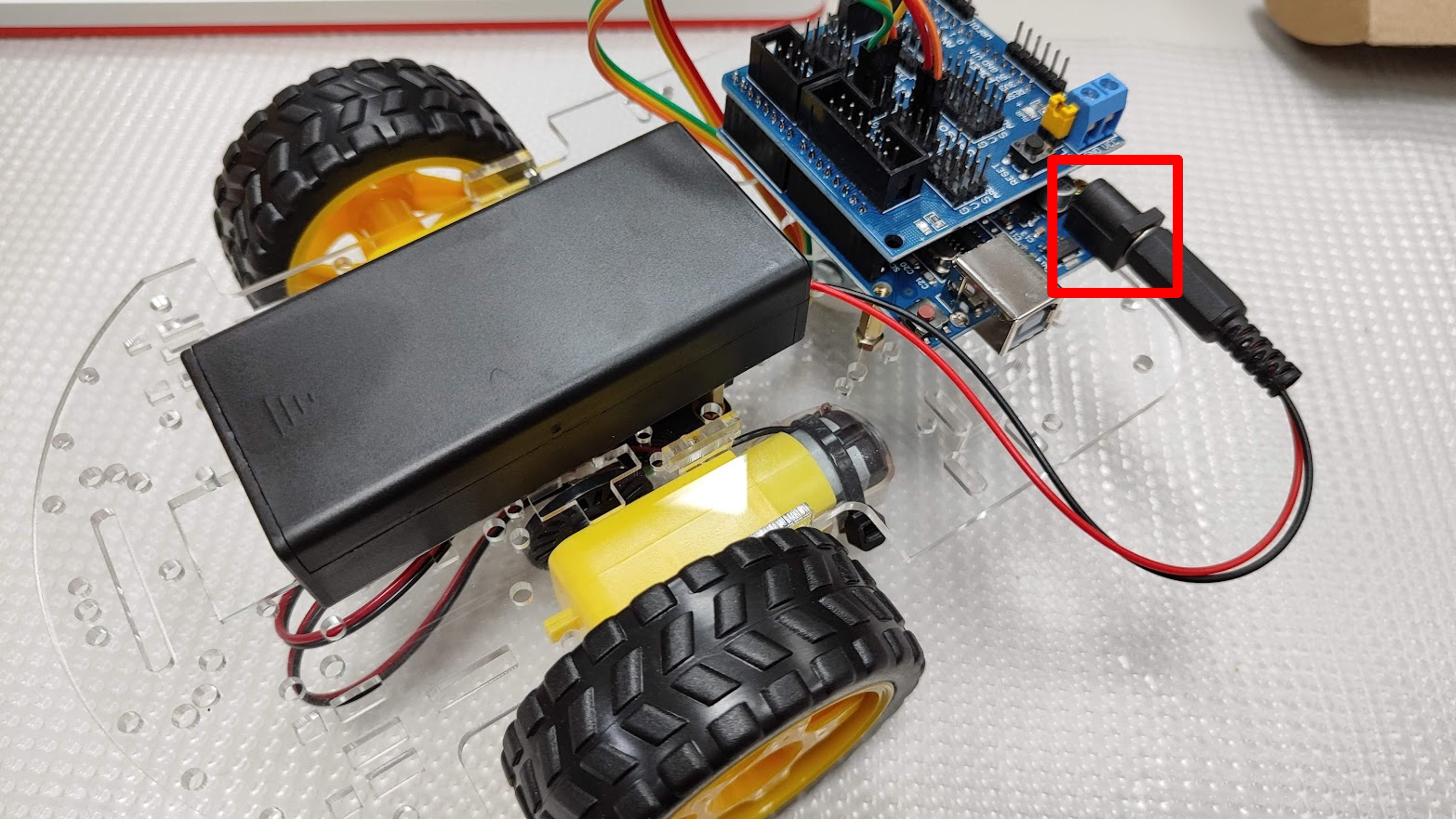
使用18650 2節電池盒的同學,請將,DC電源插頭接在Arduino UNO 的DC Jack 插座上。
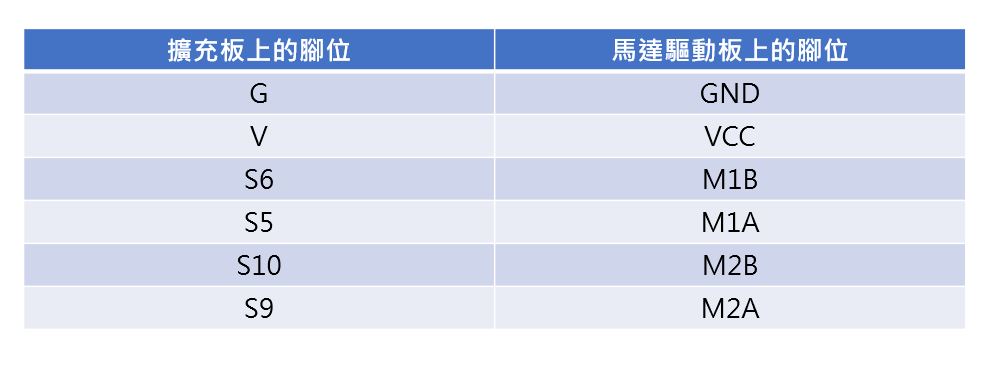
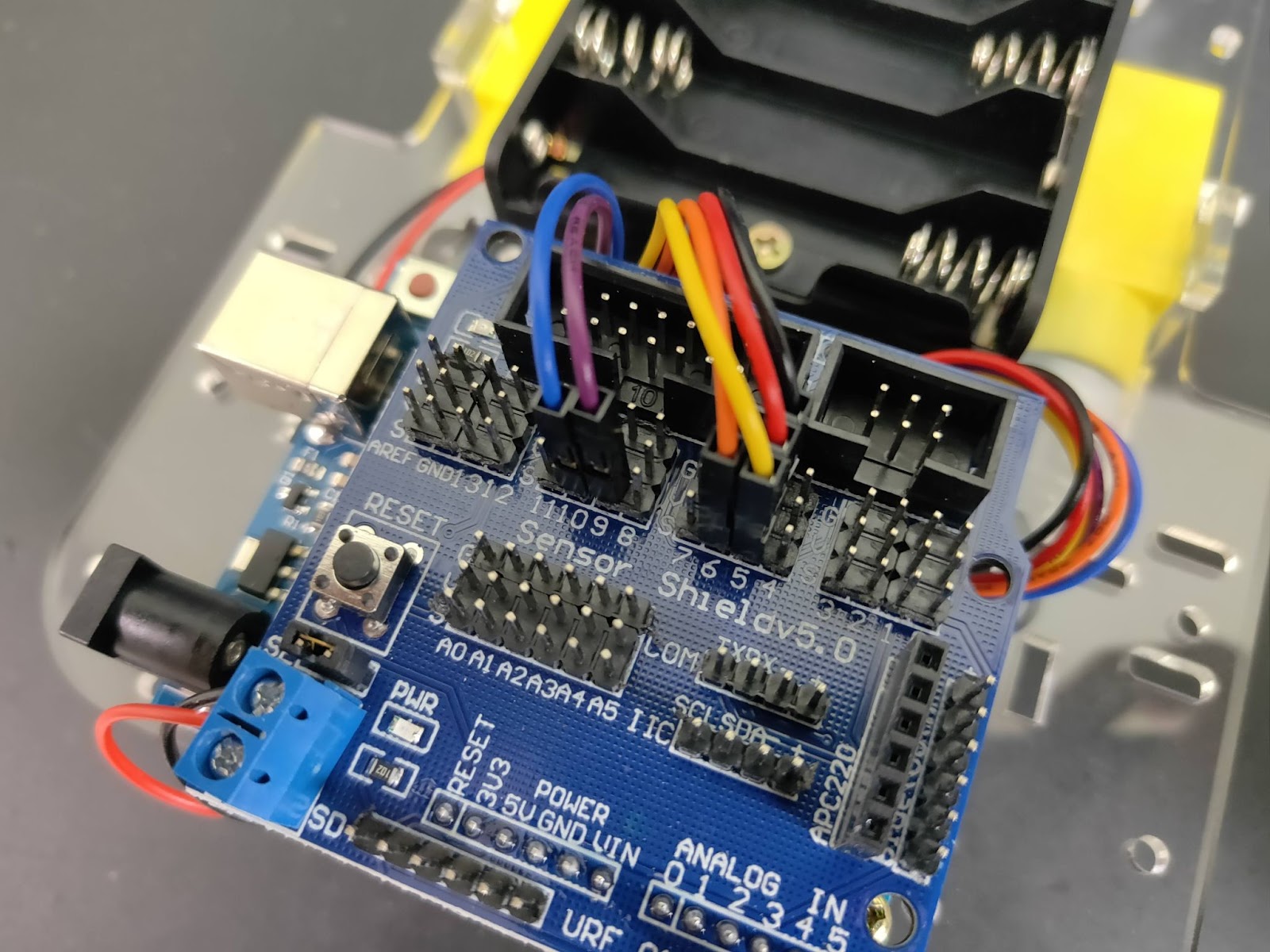
b. 拿出套件包附的「杜邦雙母連接線 x6」,依照下圖連接在排針上,連接前請先記下驅動板上面的標示。

c. 請依照下表連接對應的位置,擴充板上的 V、G 都是相連的,選擇相鄰的位置連接即可。
小知識
為了要能控制馬達的旋轉速度,需要將控制線連接在具有「PWM」功能的腳位,Arduino UNO 具備 PWM 功能的腳位有 P3、P5、P6、P9、P10、P11,在這篇文章中我們選擇其中的 5、6、9、10 來連接。
四、完成圖
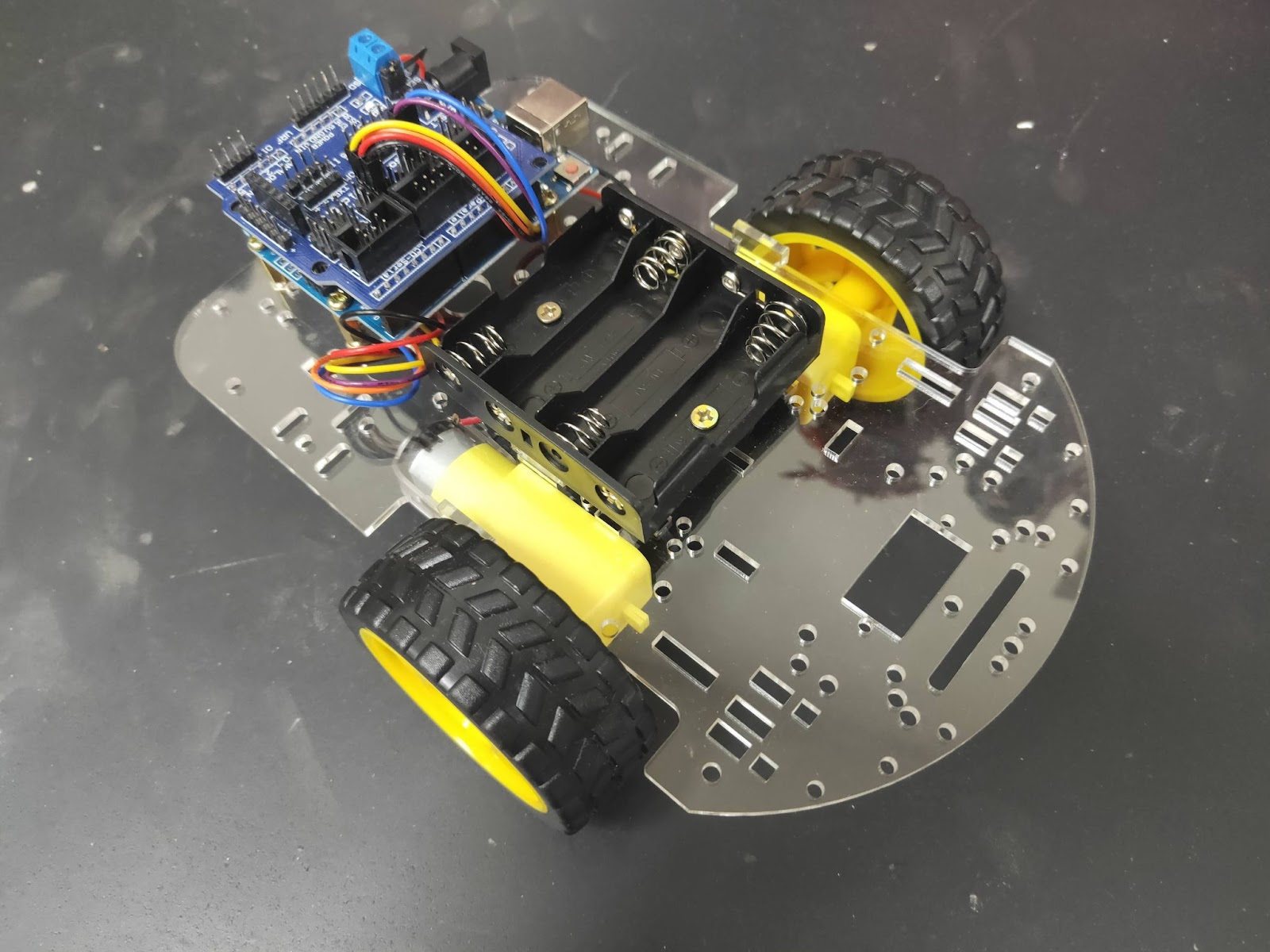
五、結語
經過上述教學內容,我們就完成了自走車最基本的安裝,接下來的單元將會從控制馬達開始,讓大家了解如何使用程式控制輪子正反轉。最後以此為基礎再加上循線感測器與超音波感測器來擴充功能,完成最常見的循線與避障功能。