RoverC-Pro 小巧的車身深受大家喜愛,如果能用自己熟悉的micro:bit 操作該有多好?有這樣想法的你絕對不能錯過這款能用micro:bit 與LinkIt 7697 的RockBot。
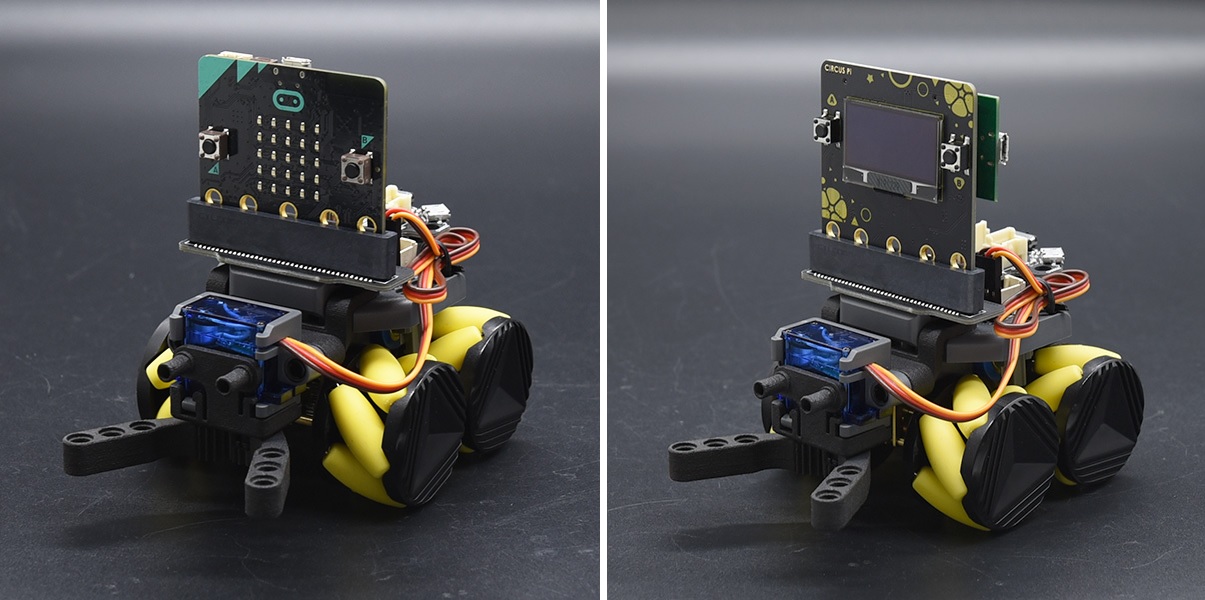
RockBot 除了RoverC-Pro 本身提供的16340電池、麥克納姆輪以及各兩組伺服馬達連接埠、I2C連接埠之外,RockBot breakout 提供兩顆超迷你RGB LED 車頭燈(藏於板子下方),還有7 組I/O 與兩個Grove 防呆插座,作為擴充額外設備使用,更重要的是提供了一個Micro USB 充電插座,用來為RoverC-Pro 的電池充電。
RockBot breakout 上也有一個獨立的開關與蜂鳴器,便於程式除錯或實驗用途。
1. 蜂鳴器 2. 擴充I/O 3. 可連接伺服馬達 4. Grove插座 5. 充電插座 6. 減速馬達 7. RGB LED
8. 相容樂高孔 9. 麥克納姆輪 10. 伺服馬達夾爪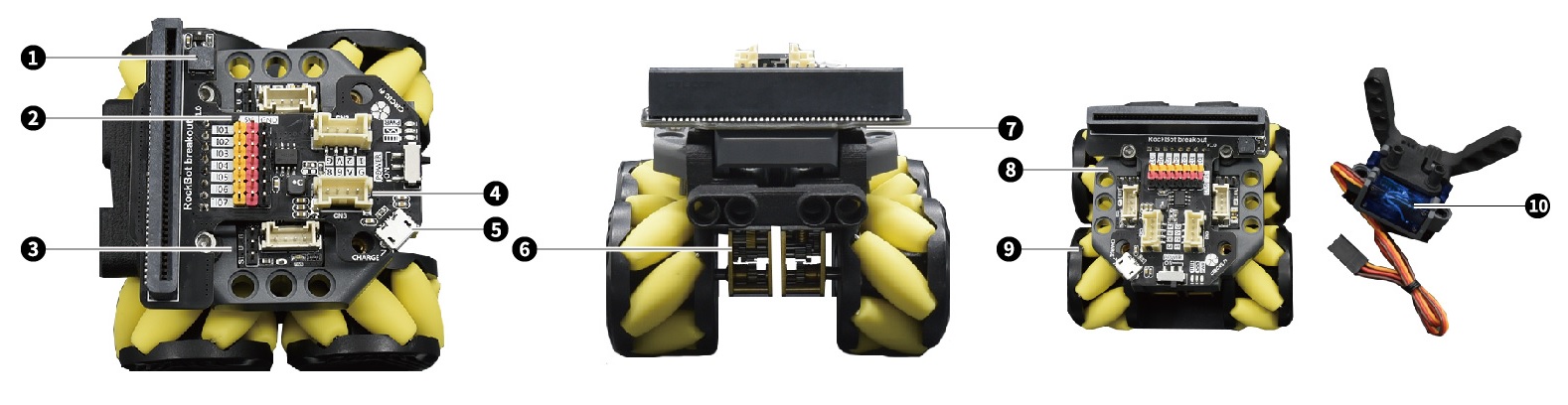
為了讓高手與新手都能用程式輕鬆駕駛RockBot ,我們也為這兩個主控板提供各自圖形化平台的擴充程式,供大家使用。
- micro:bit – MakeCode
- LinkIt 7697 – BlocklyDuino V3
使用 micro:bit 駕駛RockBot (相容 V1.5 與 V2 )
.新增擴充程式
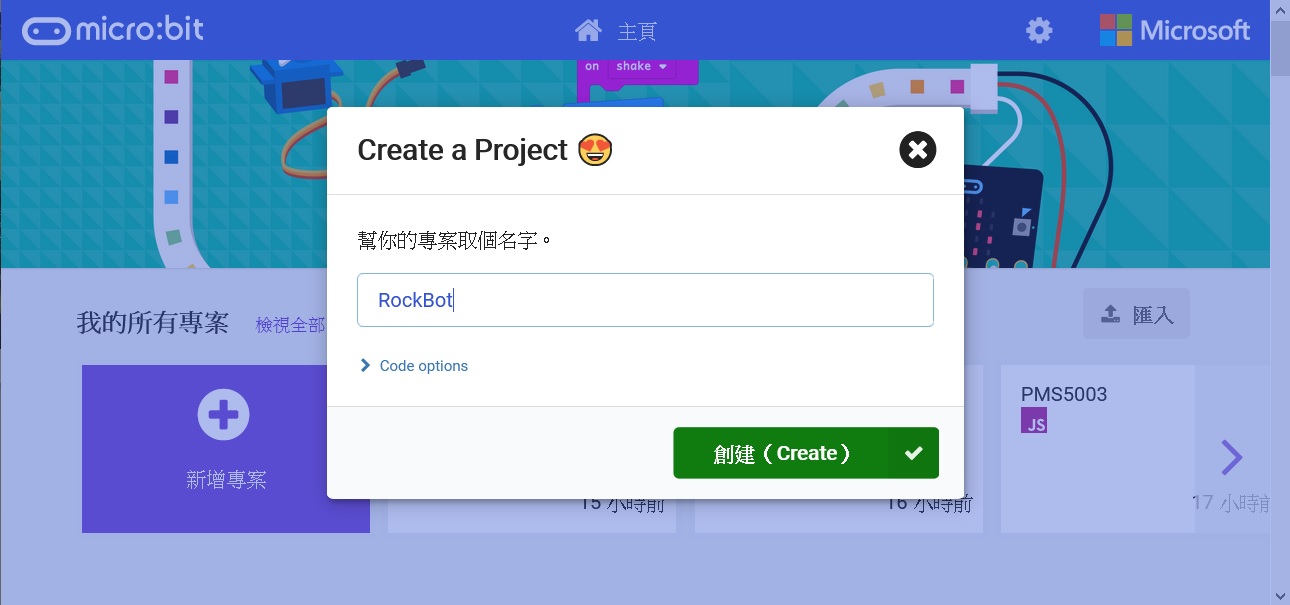
首先進到MakeCode 網站,並依照您日常使用的習慣新增一個專案。
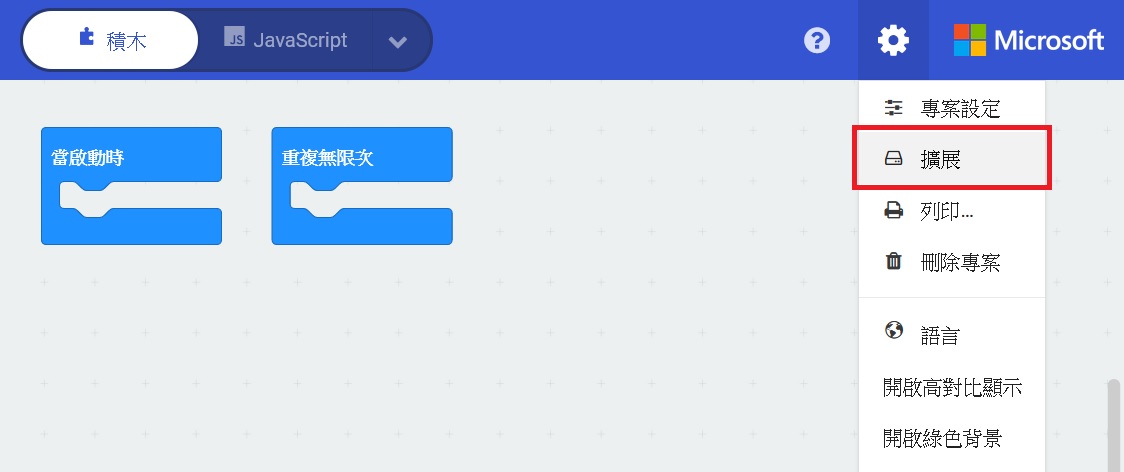
點選右上角「齒輪」的符號,並選擇下拉式選單內的「擴展」,我們需要擴充RockBot的程式。
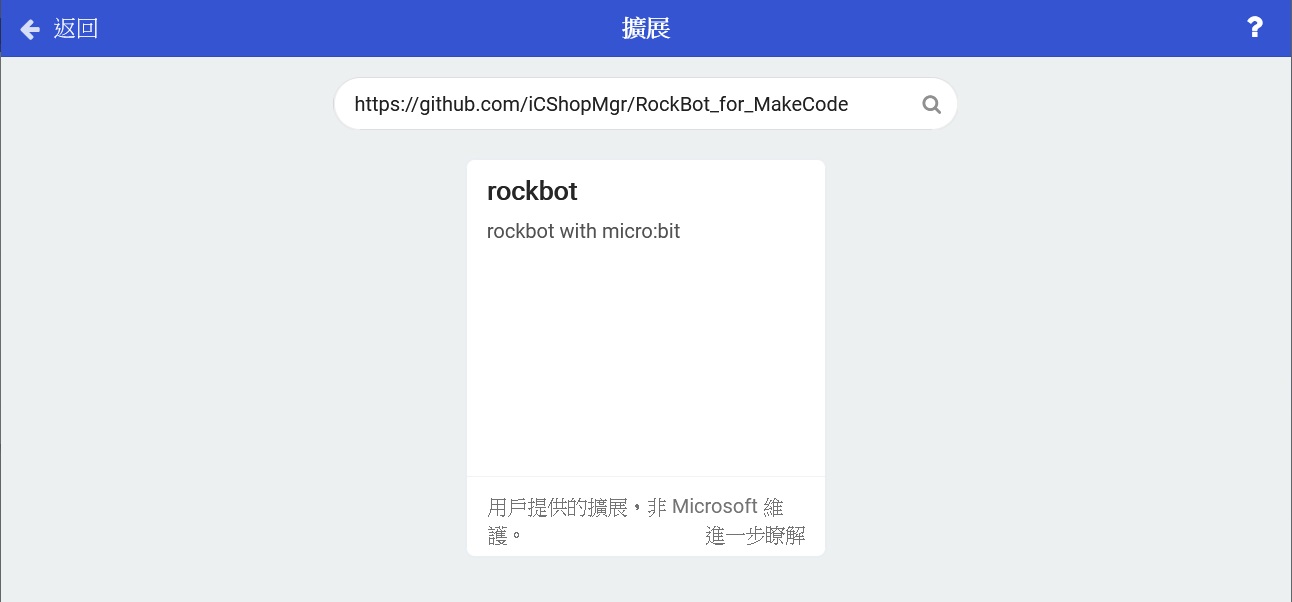
複製下列網址貼到搜尋欄內,並按下搜尋,即可找到「rockbot」 選項。點選搜尋到的選項後,RockBot 程式會自動新增到您的程式列表內。
https://github.com/iCShopMgr/RockBot_for_MakeCode
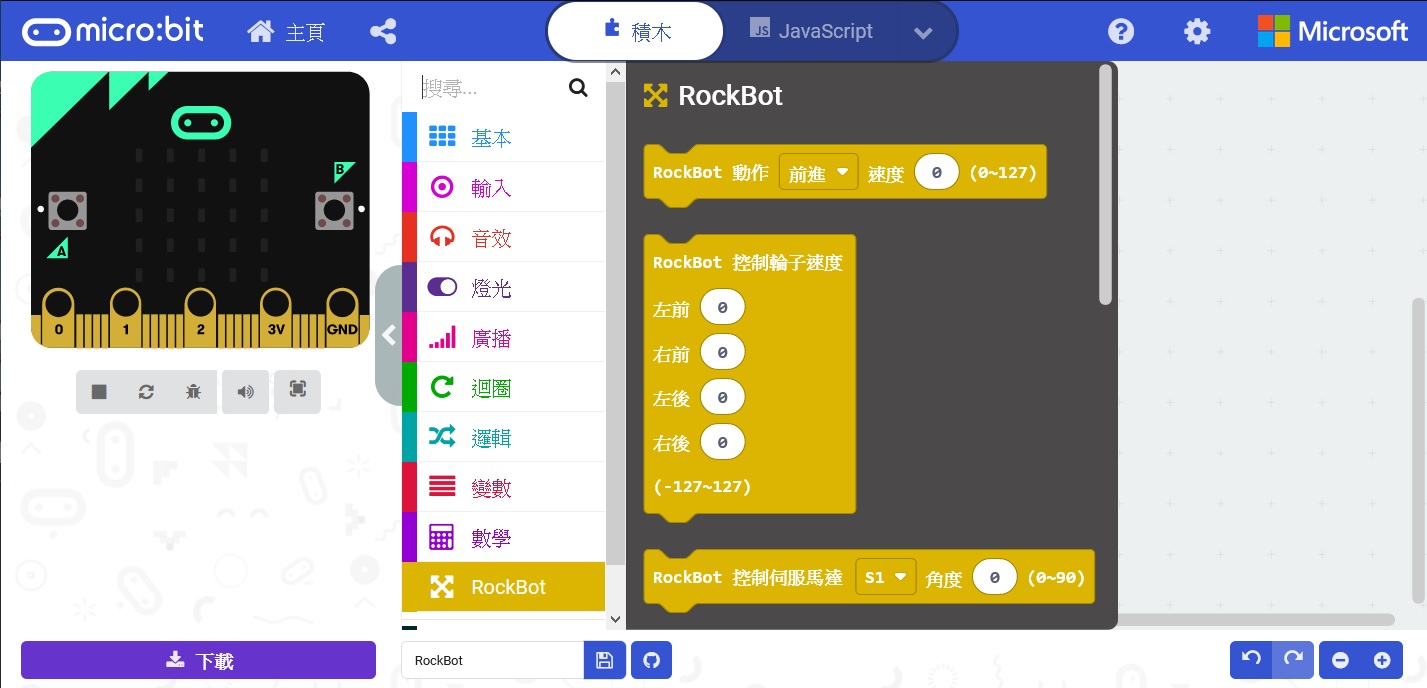
經過上述步驟就能在程式列表上看到RockBot 的選項,點開後所有RockBot 的功能都在裡面。
.控制RockBot 移動
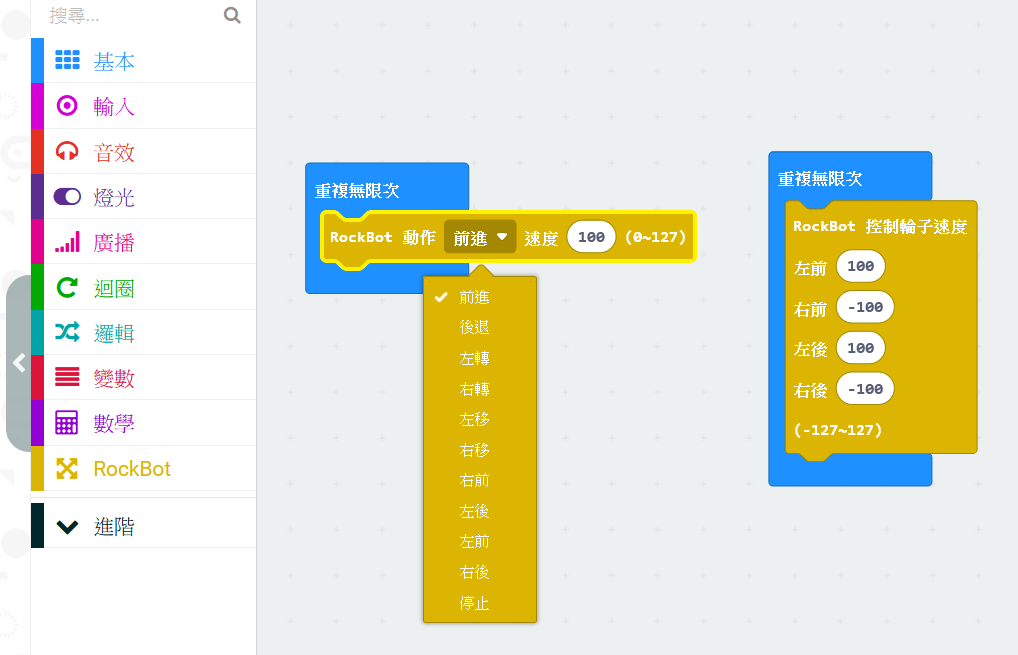
RockBot 移動的方式有兩種,一種是選擇「動作」來移動,如下圖左側,透過下拉式選單選擇動作,並在「速度」的欄位輸入要使車子以多少馬力移動,範圍是 0 ~ 127。
另一種方式是直接設定每個輪子要移動的「速度」與「方向」,如下圖右側,速度的範圍與剛才的相同,是 0 ~ 127,方向則是改變數值的「正負號」來控制。數值是正的,輪子向前旋轉。數值是負的,輪子向後旋轉。數值若為零,則輪子會停止。
.控制RockBot 伺服馬達(夾爪)
RoverC-Pro 上有兩組伺服馬達連接埠,左側是S1 右側是S2 ,請依照上面的「S V G」標示正確連接伺服馬達,S 表示訊號(伺服馬達橘色線)、V 表示供電正極(伺服馬達紅色線)、G 表示供電負極(伺服馬達褐色線)。
控制程式相當簡單,請依照您連接的「位子」選擇 S1 或是 S2 ,「角度」的範圍限制在 0 ~ 90 度,0 度是張開夾爪,90 度則是閉合夾爪,可以輸入數值控制夾爪張合的角度。

.車頭燈控制
開啟車頭燈有兩個步驟,第一是「初始化設定」,其次是「控制顏色」。我們需要透過下圖左側的程式
「RGB LED 設定總亮度 (0~255)」來初始化,這一步是告訴RockBot 我們要開始使用車頭燈囉!緊接著就能直接使用控制燈色的程式點亮車頭燈,如下圖右側。

控制車燈的方式相當多元,您可以一次控制全部的燈,或是單獨控制左側或右側的車燈。燈光可透過下拉式選單選取光的顏色,若選擇黑色則關閉車燈,也可以使用「關閉 RGB LED」這個程式關閉全部的車燈。除了既有的選取色塊,您也可以如下圖右側,直接控制「三色的比例」混合出自己的顏色。

.控制蜂鳴器
蜂鳴器的使用就不再贅述了,與一般的操作相同,直接採用「音效」即可控制。

.擴充 I/O 的使用
目前我們提供簡單的數位、類比的輸入與輸出,每個選項旁邊都有清楚標示連接的腳位。您可以依照腳位連接一些特殊功能的感測器或元件,再自行用擴充程式控制。宜可用來連接額外的伺服馬達,用MakeCode 原本提供的伺服馬達程式來控制。

使用 LinkIt 7697 駕駛RockBot
使用 LinkIt 7697 還需要搭配 7697:bit breakout 擴展板才能安裝到 RockBot 上。相關資訊與購買方式請參考下列連結:
.下載擴充程式
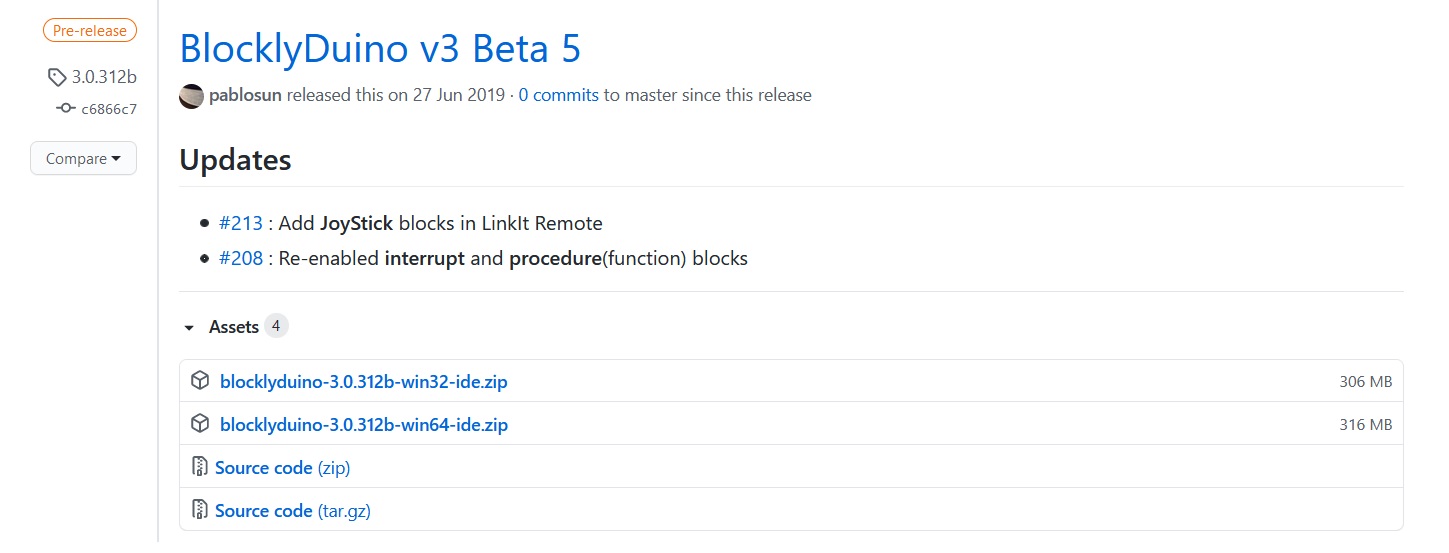
請點選下列連結至 BlocklyDuino V3 下載網頁,並依照您電腦的系統下載對應的版本,目前BlocklyDuino V3 只支援 Windows 系統的電腦。
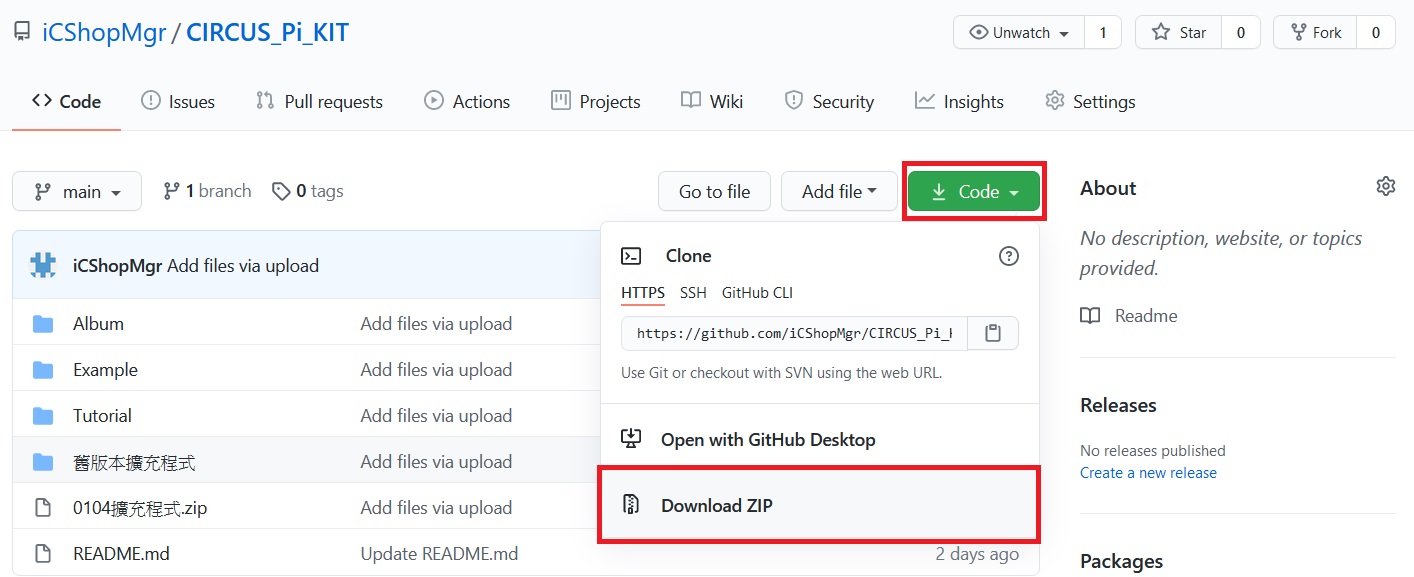
緊接著下載RockBot 擴充程式,請點選下列網址進到存放程式的Github網頁。點選綠底白字的「Code」按鈕,再選取 「Download ZIP」將檔案全部壓縮並下載下來。
https://github.com/iCShopMgr/CIRCUS_Pi_KIT
將下載下來的兩個檔案各自解壓縮。
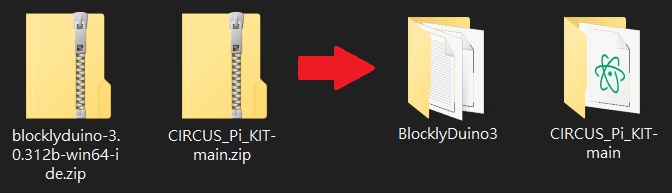
進到 CIRCUS_Pi_KIT-main 的資料夾,在裡面可以找到 「0104擴充程式.zip」,若有更新的版本將會更換掉開頭的4個數字,將這個檔案解壓縮後可以得到「arduino-1.8.5」、「package.nw」這兩個資料夾,這是我們用來擴充BlocklyDuino V3 的檔案夾。
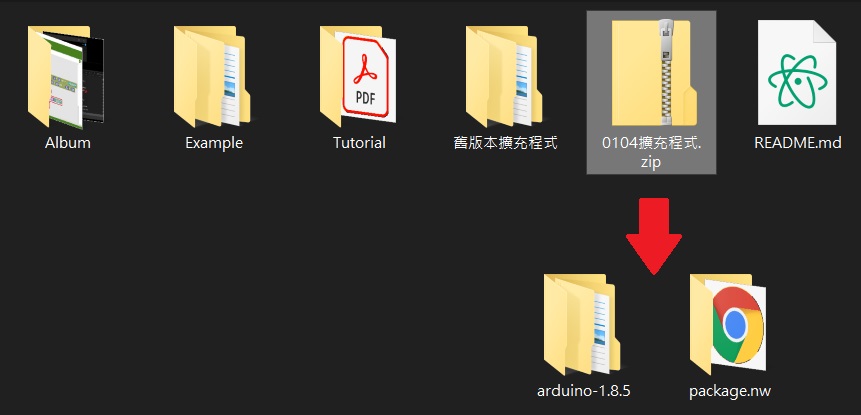
將方才的兩個檔案複製並覆蓋到 「BlocklyDuino3」資料夾裡面,這樣就完成了。
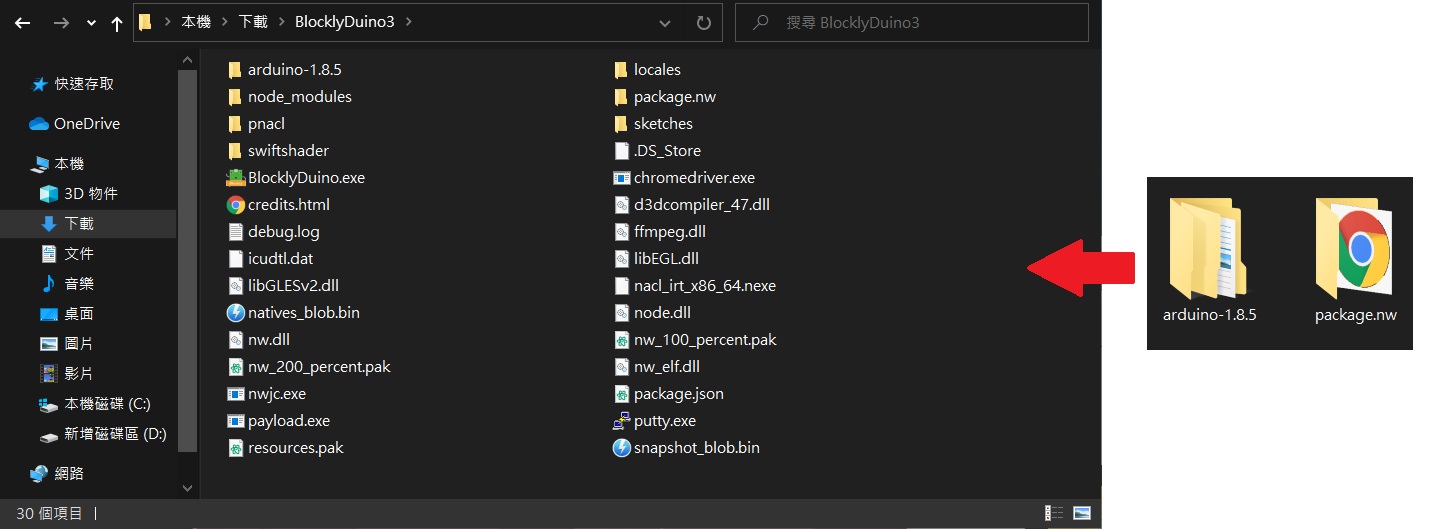
滑鼠左鍵點兩下 「BlocklyDuino.exe」即可開啟程式編輯器,並可在程式列表內找到 RockBot。
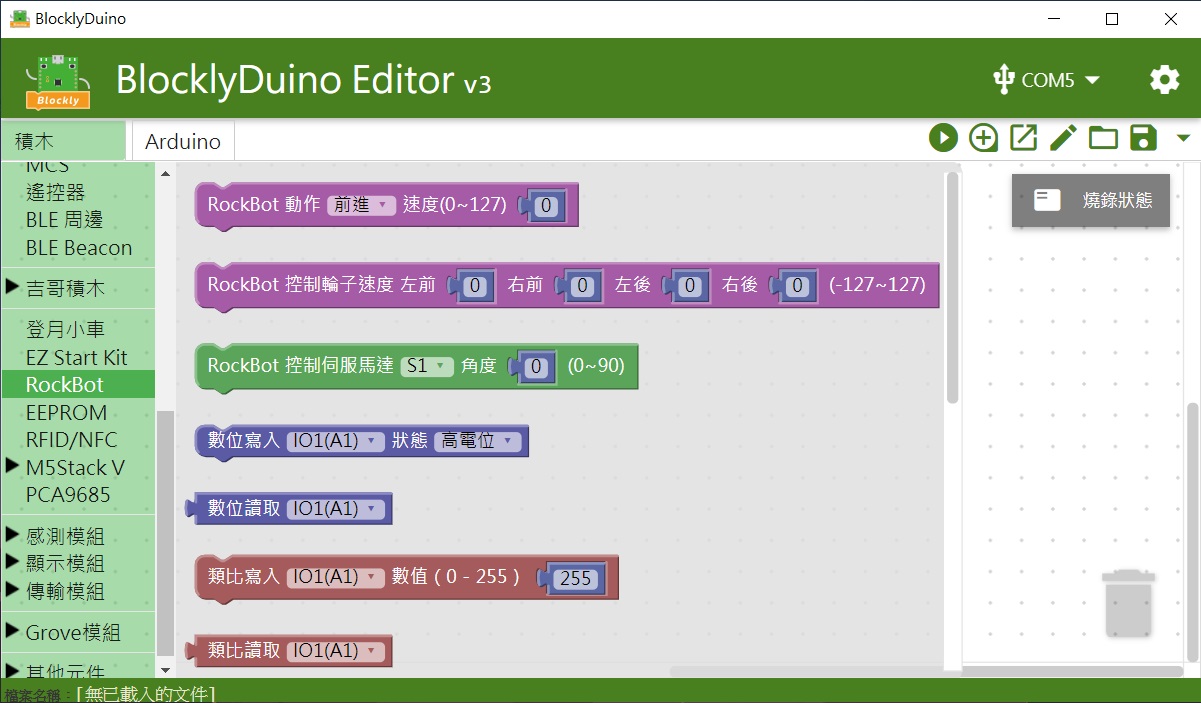
.控制RockBot 移動
RockBot 移動的方式有兩種,一種是選擇「動作」來移動,如下圖左側,透過下拉式選單選擇動作,並在「速度」的欄位輸入要使車子以多少馬力移動,範圍是 0 ~ 127。
另一種方式是直接設定每個輪子要移動的「速度」與「方向」,如下圖右側,速度的範圍與剛才的相同,是 0 ~ 127,方向則是改變數值的「正負號」來控制。數值是正的,輪子向前旋轉。數值是負的,輪子向後旋轉。數值若為零,則輪子會停止。

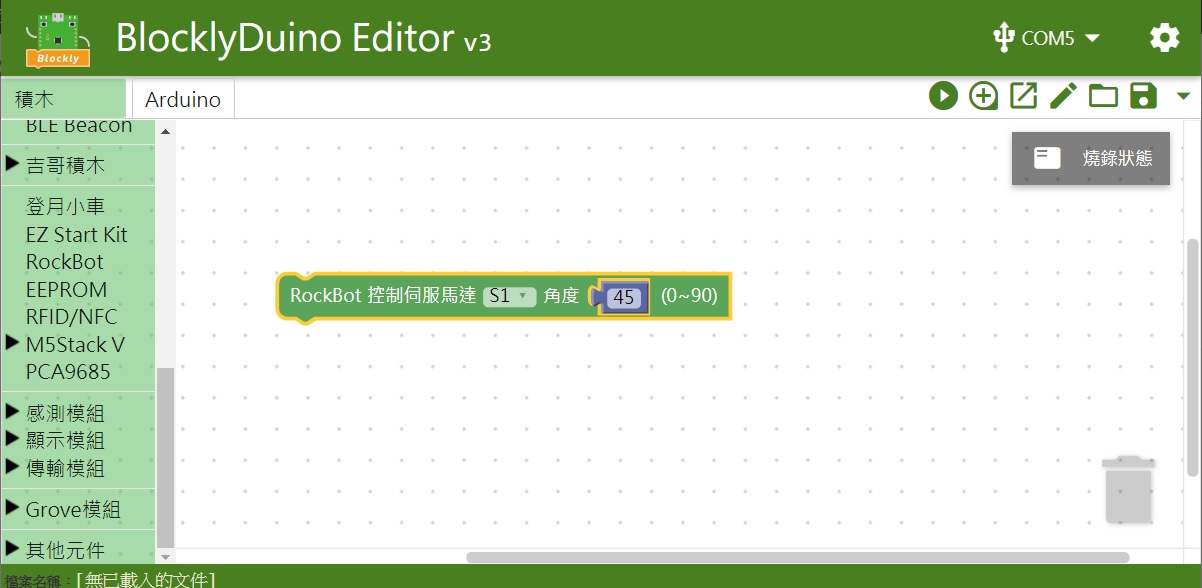
.控制RockBot 伺服馬達(夾爪)
RoverC-Pro 上有兩組伺服馬達連接埠,左側是S1 右側是S2 ,請依照上面的「S V G」標示正確連接伺服馬達,S 表示訊號(伺服馬達橘色線)、V 表示供電正極(伺服馬達紅色線)、G 表示供電負極(伺服馬達褐色線)。
控制程式相當簡單,請依照您連接的「位子」選擇 S1 或是 S2 ,「角度」的範圍限制在 0 ~ 90 度,0 度是張開夾爪,90 度則是閉合夾爪,可以輸入數值控制夾爪張合的角度。
.車頭燈控制
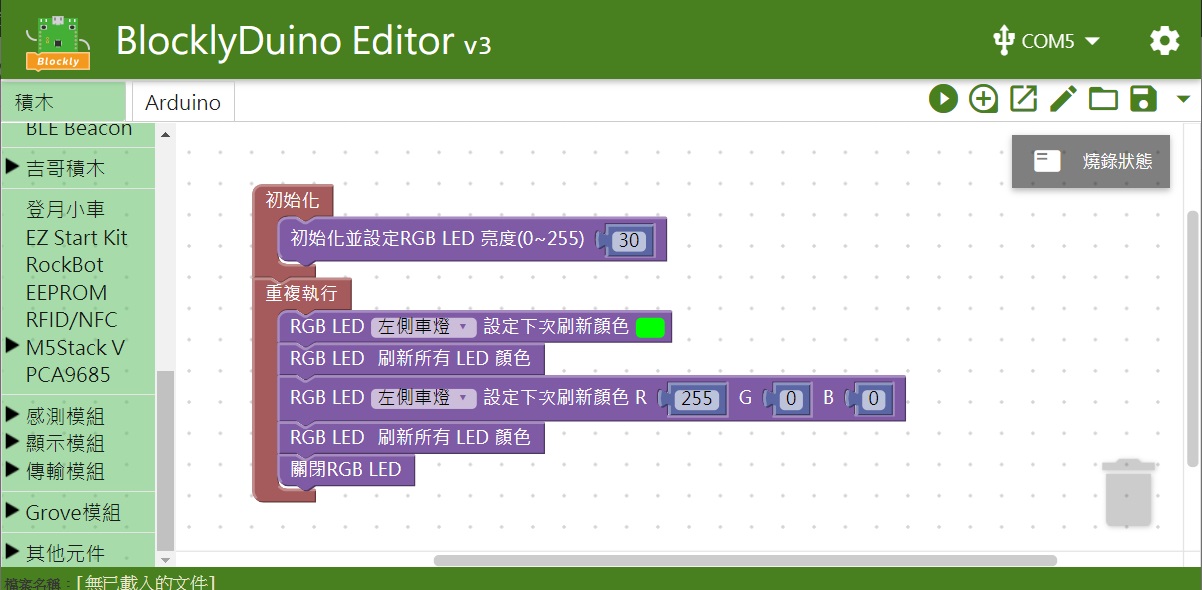
開啟車頭燈有三個步驟,第一是「初始化設定」,其次是「設定顏色」與「刷新顏色」。
我們需要透過「初始化並設定 RGB LED 亮度 (0~255)」來初始化,這一步是告訴RockBot 我們要開始使用車頭燈囉!緊接著就能直接使用「設定下次刷新顏色」控制燈色,與「刷新所有LED顏色」來點亮車頭燈,如下圖。
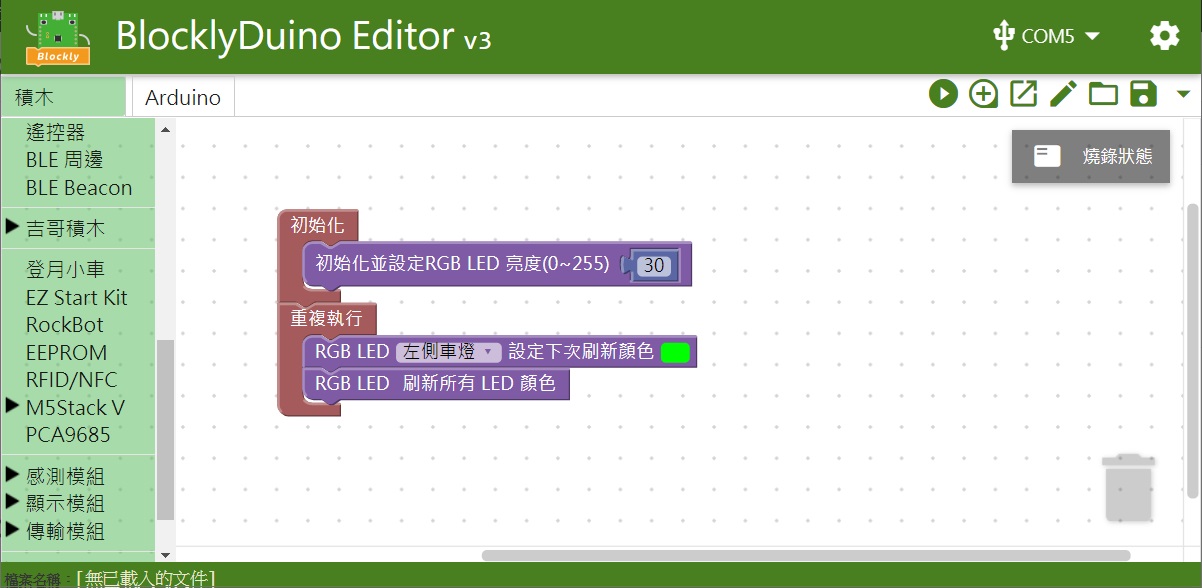
設定車燈顏色需要特別注意一點,設定完都必須要刷新,若沒有刷新的話,車燈是不會改變的。
控制車燈顏色的方式可透過下拉式選單選取光的顏色,若選擇黑色則關閉車燈,也可以使用「關閉 RGB LED」這個程式關閉全部的車燈。除了既有的選取色塊,您也可以直接控制「三色的比例」混合出自己的顏色。
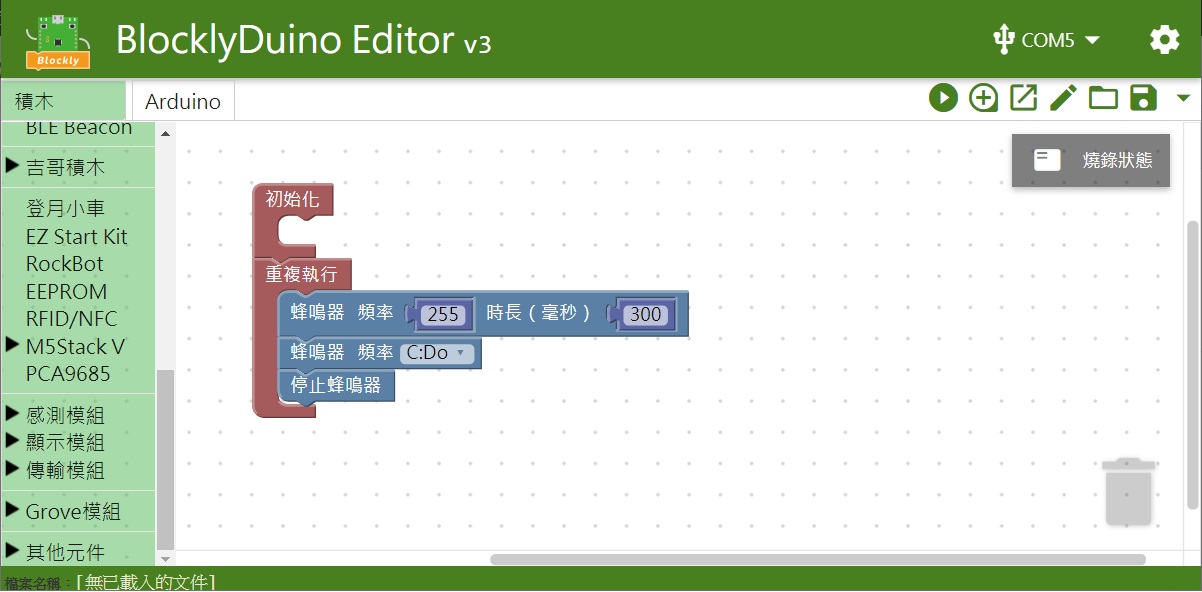
.控制蜂鳴器
控制蜂鳴器發出聲音的方式有兩種,一個是直接設定頻率與時間長度,另一個是透過下拉式選單來選擇要發出的聲音,可搭配「時間」程式決定發出聲音的時間,再用「停止蜂鳴器」來關閉聲音。
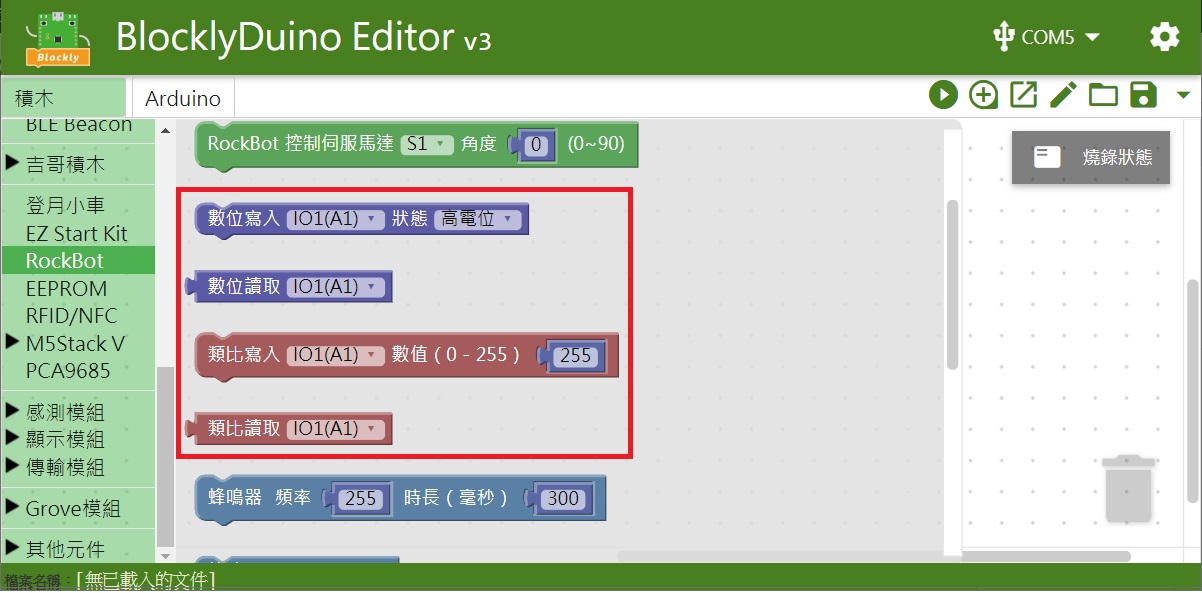
.擴充 I/O 的使用
目前我們提供簡單的數位、類比的輸入與輸出,每個選項旁邊都有清楚標示連接的腳位。您可以依照腳位連接一些特殊功能的感測器或元件,再自行用擴充程式控制。宜可用來連接額外的伺服馬達,用BlocklyDuino V3 原本提供的伺服馬達程式來控制。
結語
上述就是教大家如何使用 micro:bit 與 LinkIt 7697 來操控 RockBot,未來我們也會為 RockBot 加裝不同的元件,並新增不同的擴充程式來增加功能,發展各種玩法。您也可以發揮創意將家中閒置的樂高積木零件裝在 RockBot 上, 打造屬於自己的 RockBot。