JetBot 是NVIDIA使用自家人工智慧開發套件Jetson Nano,所開發的開放原始碼人工智慧機器人平台。Jetson Nano 針對需要小巧且強大運算的AI邊緣裝置、嵌入式物聯網注入新的力量。
搭載Jetson Nano 的JetBot 能夠實現影像辨識駕駛功能,與一般單板電腦不同,GPU能加速AI模型的推論速度,減少延遲以達到即時辨識的效果。
iCShop x CIRCUS Pi 全新推出的JetBot AI 自駕車套件,使用Jetson Nano 2GB 單板電腦,讓所有想要入門JetBot專案的學習者們,能夠以相當平易近人的價格入手,我們也將陸續推出一系列相關的使用技術文章與大家分享,讓您不用擔心購買後不知道該如何使用。本篇為「單元(一)組裝教學」要帶大家一起組裝手中的JetBot AI自駕車套件。
一、零件清單
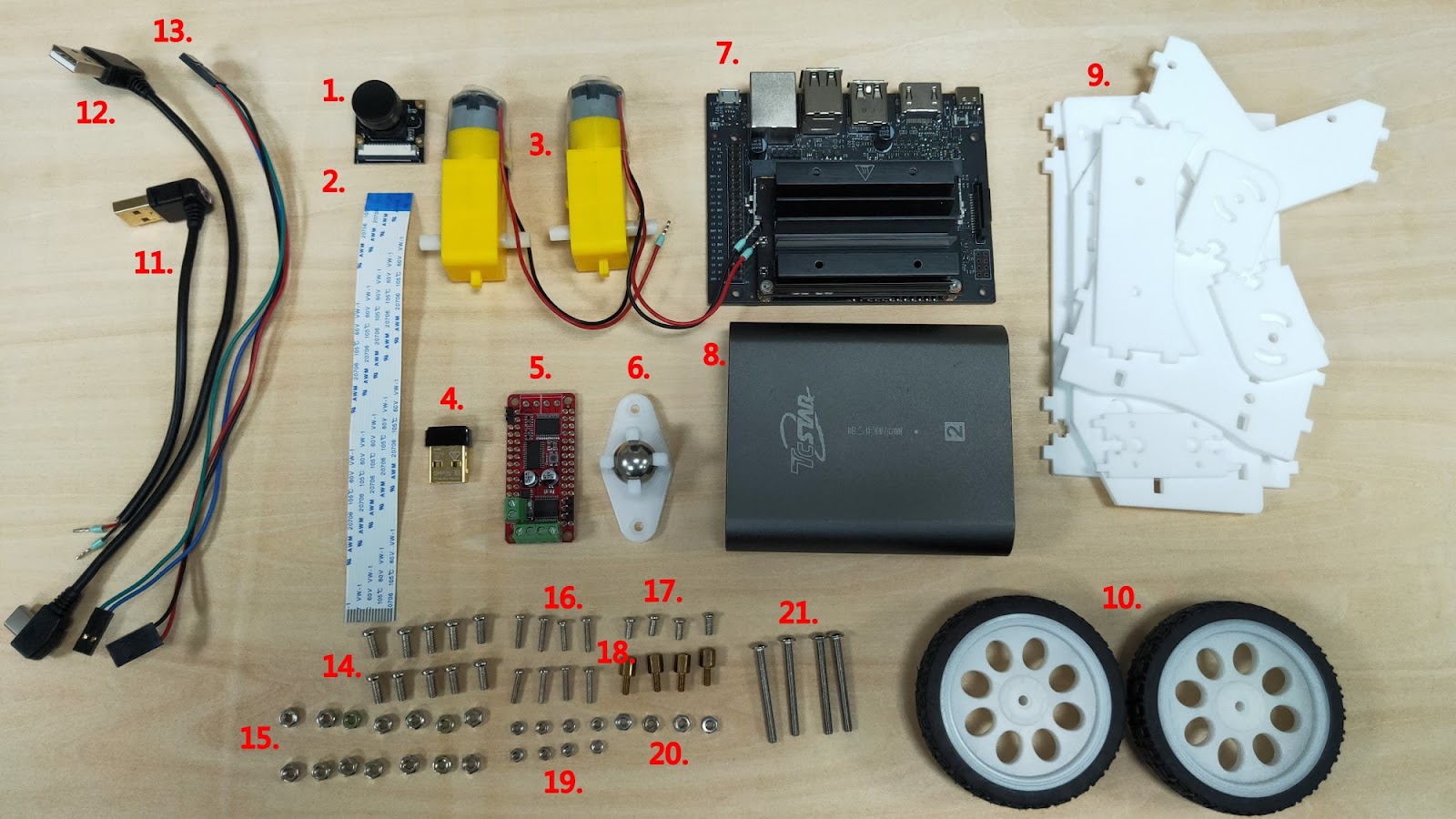
零件清單如下圖表所示,請先檢查看看是否有缺少的項目。
| 1. | 攝影鏡頭 | 8. | 行動電源 | 15. | M3 螺帽 x14 |
| 2. | 鏡頭排線 | 9. | 壓克力組件+魔鬼氈 | 16. | 螺絲 M2x10mm x8 |
| 3. | 直流馬達 x2 | 10. | 輪子 x2 | 17. | 螺絲 M2.5x5mm x4 |
| 4. | 無線網卡 | 11. | USB to 歐式端子2P | 18. | M2.5 銅柱6mm x4 |
| 5. | 馬達驅動板 | 12. | USB to Type C | 19. | M2 螺帽 x8 |
| 6. | 萬向輪 | 13. | 杜邦母座5P to 2+3P | 20. | M2.5 螺帽 x4 |
| 7. | Jetson Nano 2GB | 14. | 螺絲 M3*8mm x10 | 21. | 螺絲 M3x30mm x4 |
二、組裝步驟
1. 安裝馬達驅動板
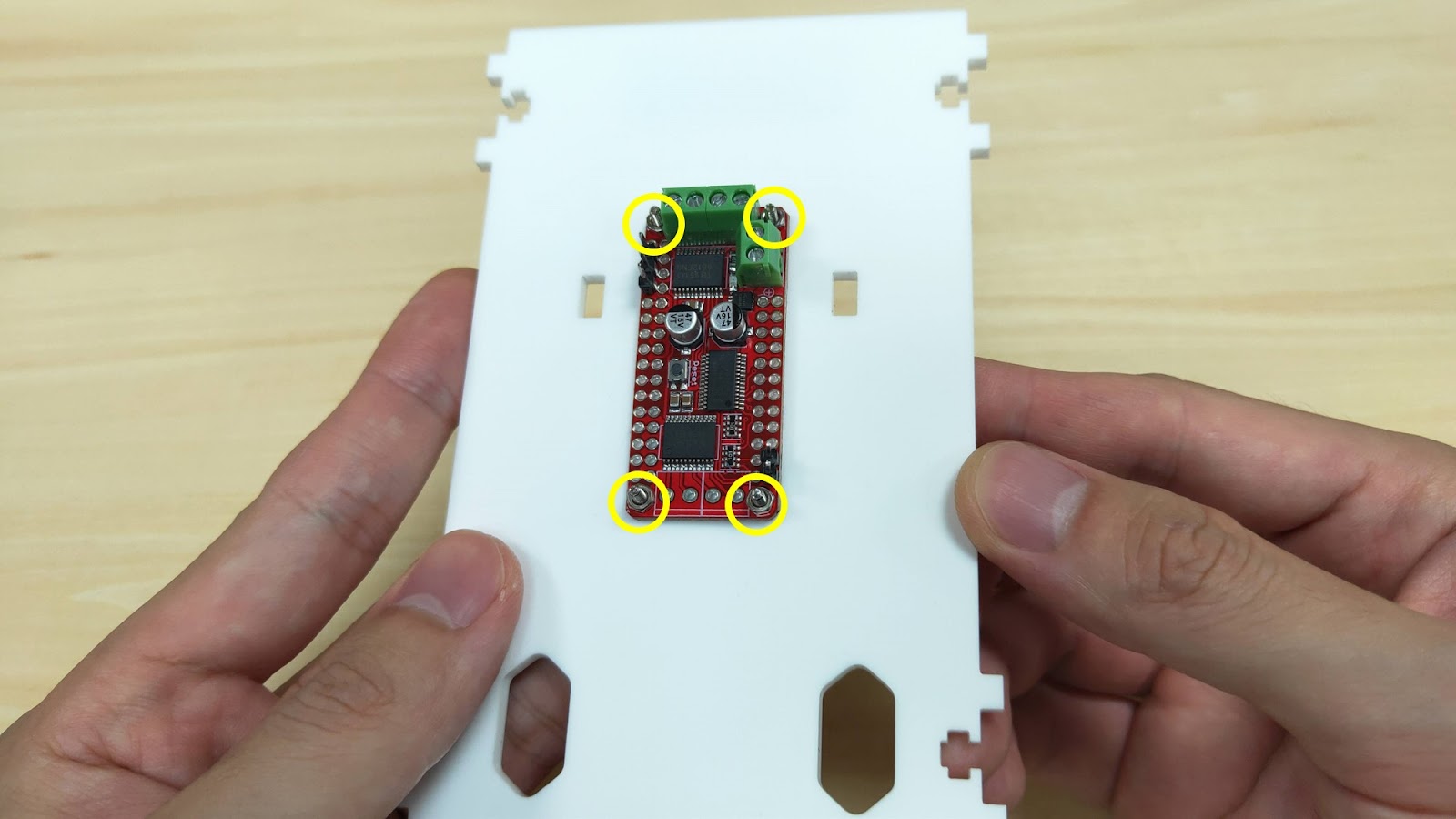
1-1. 準備如下圖所示的壓克力板、馬達驅動板、螺絲 M2x10mm x4 與 M2 螺帽 x4。

1-2. 馬達驅動板的鎖孔位子對齊壓克力板中間的四個圓孔。
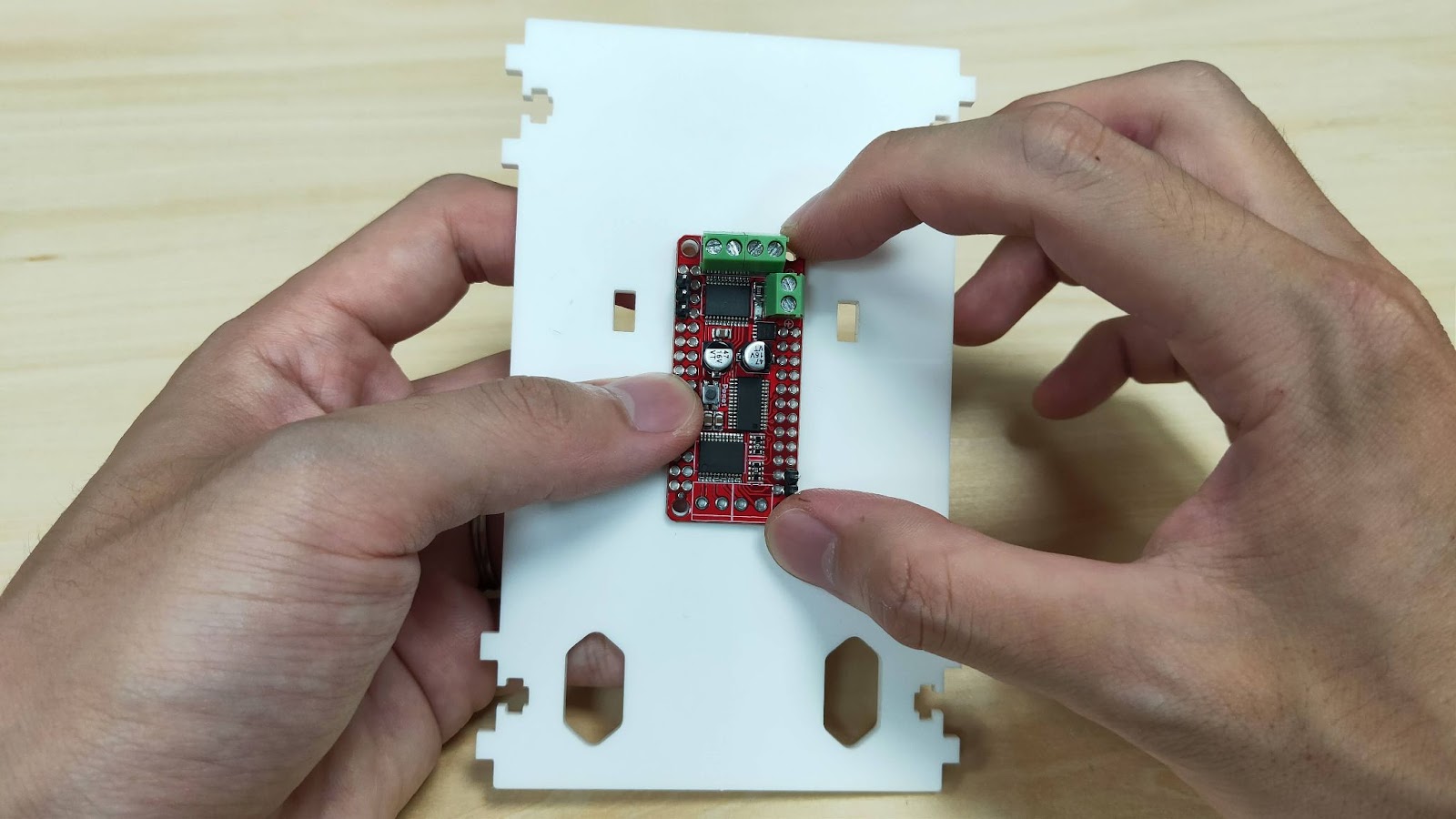
1-3. 使用螺絲 M2x10mm x4 與M2 螺帽 x4,如下圖所示將其固定。
2. 連接馬達驅動板電源線
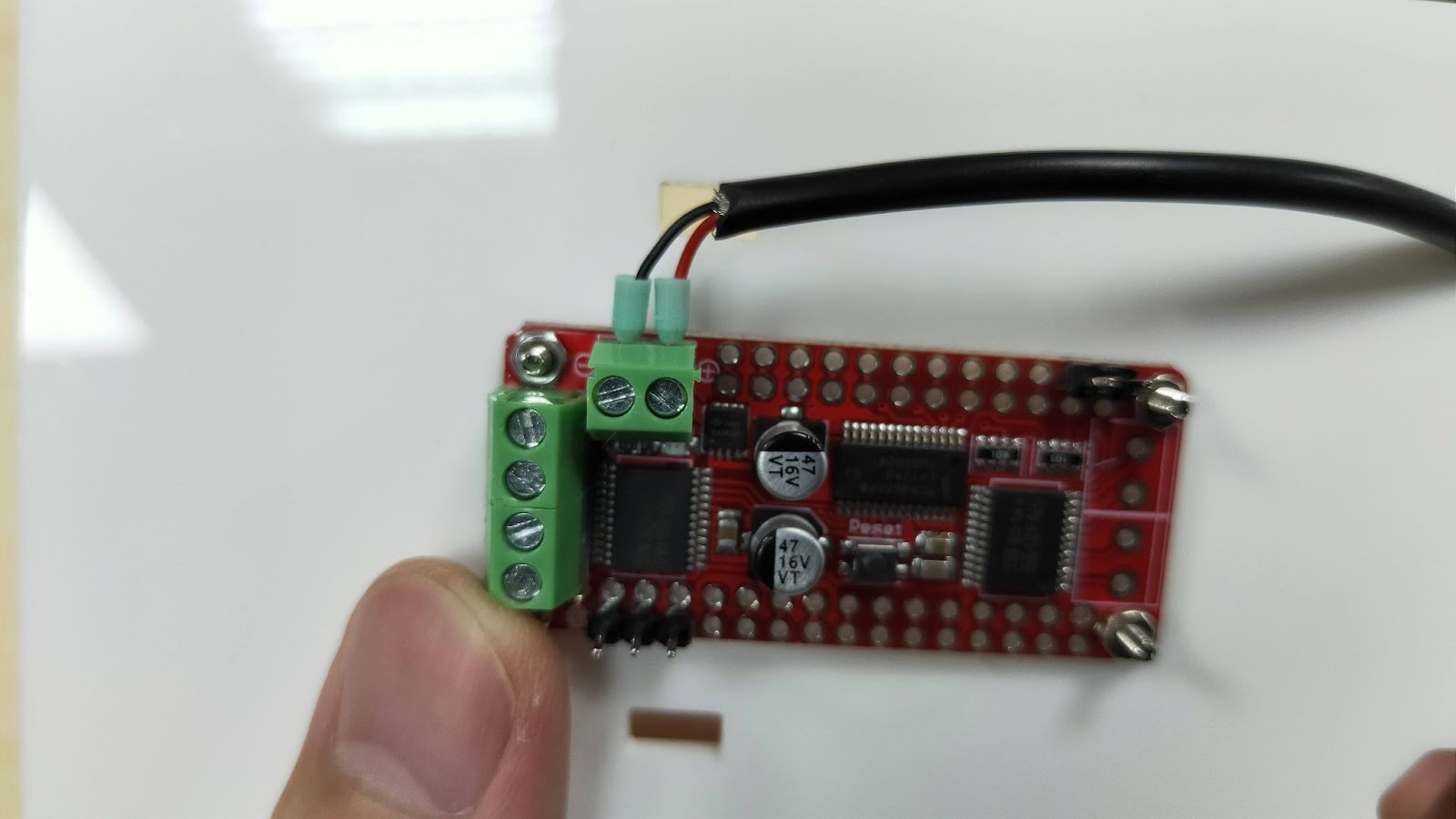
2-1. 準備USB to 歐式端子2P,這條線會直接從行動電源為馬達驅動板供電。

2-2. 將USB to 歐式端子2P 這條線,如下圖穿過壓克力孔洞。

2-3. 歐式端子那端有分紅色線與黑色線,請用一字螺絲起子將連接線固定在歐式端子座上,紅色線接馬達驅動板上的+極,黑色線接馬達驅動板上的-極,連接位子如下圖所示。
3. 安裝直流馬達
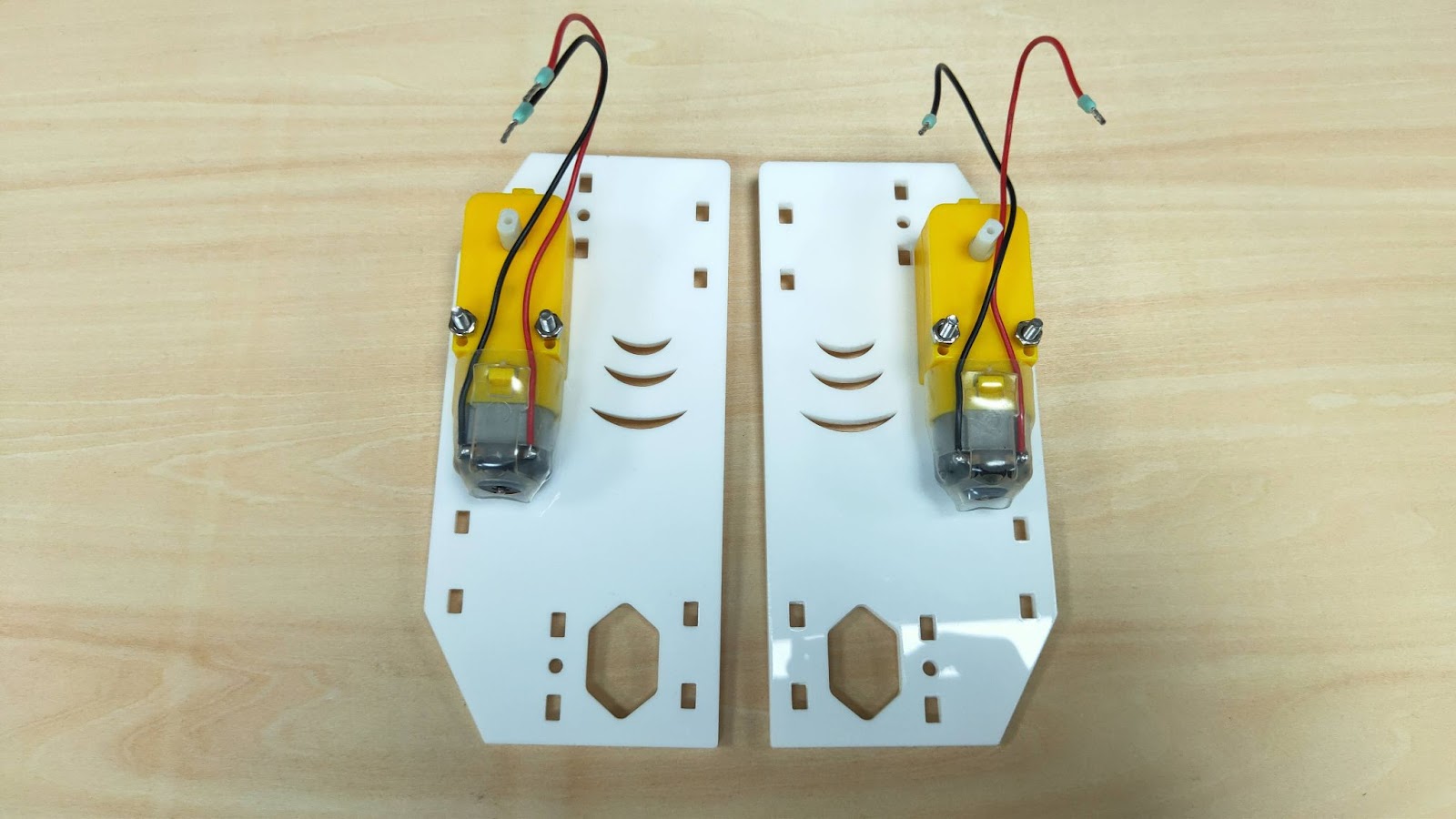
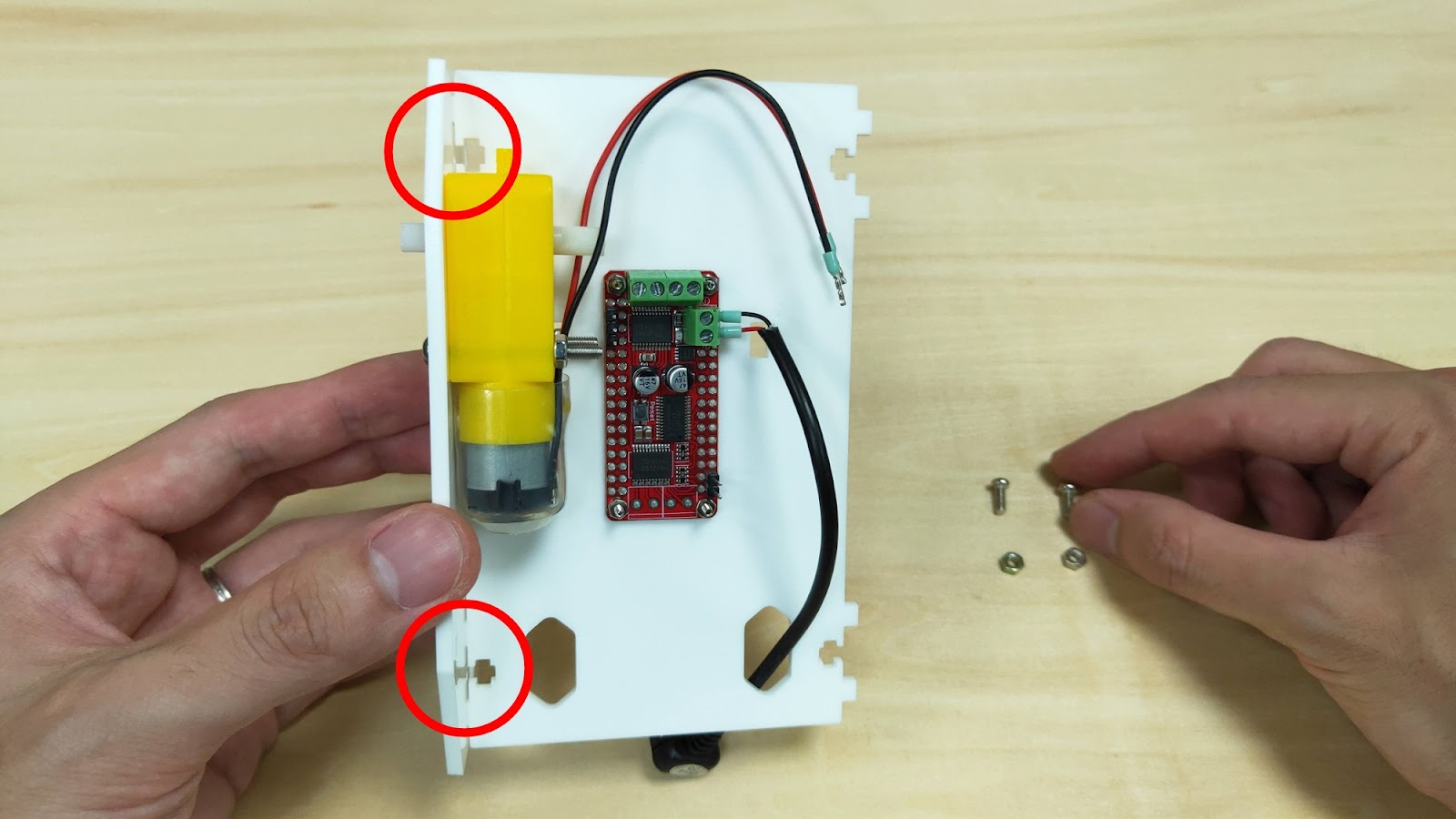
3-1. 準備兩顆直流馬達、壓克力側板 x2、螺絲 M3x30mm x4 與M3 螺帽 x4,直流馬達皆已焊接連接線並壓接歐式端子。
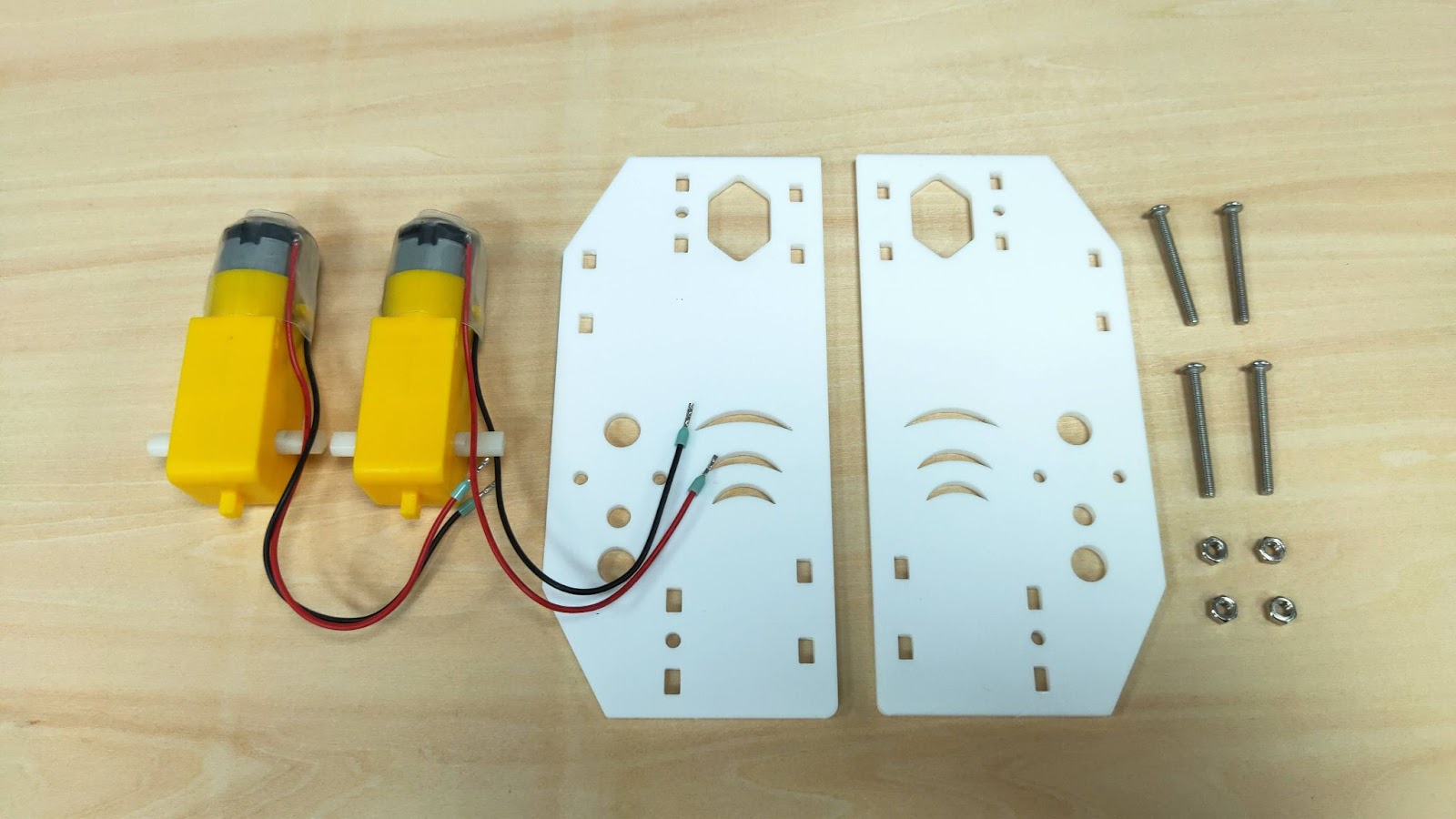
3-2. 馬達與壓克力板對齊的位子如下圖所示,紅色圈圈的位子為螺絲鎖孔位子。
3-3. 將螺絲 M3x30mm x2 穿過鎖孔,再用M3 螺帽 x2 如下圖所示將馬達固定。

3-4. 另一側步驟相同,但需要對稱,如下圖所示。
4. 安裝Jetson Nano 2GB
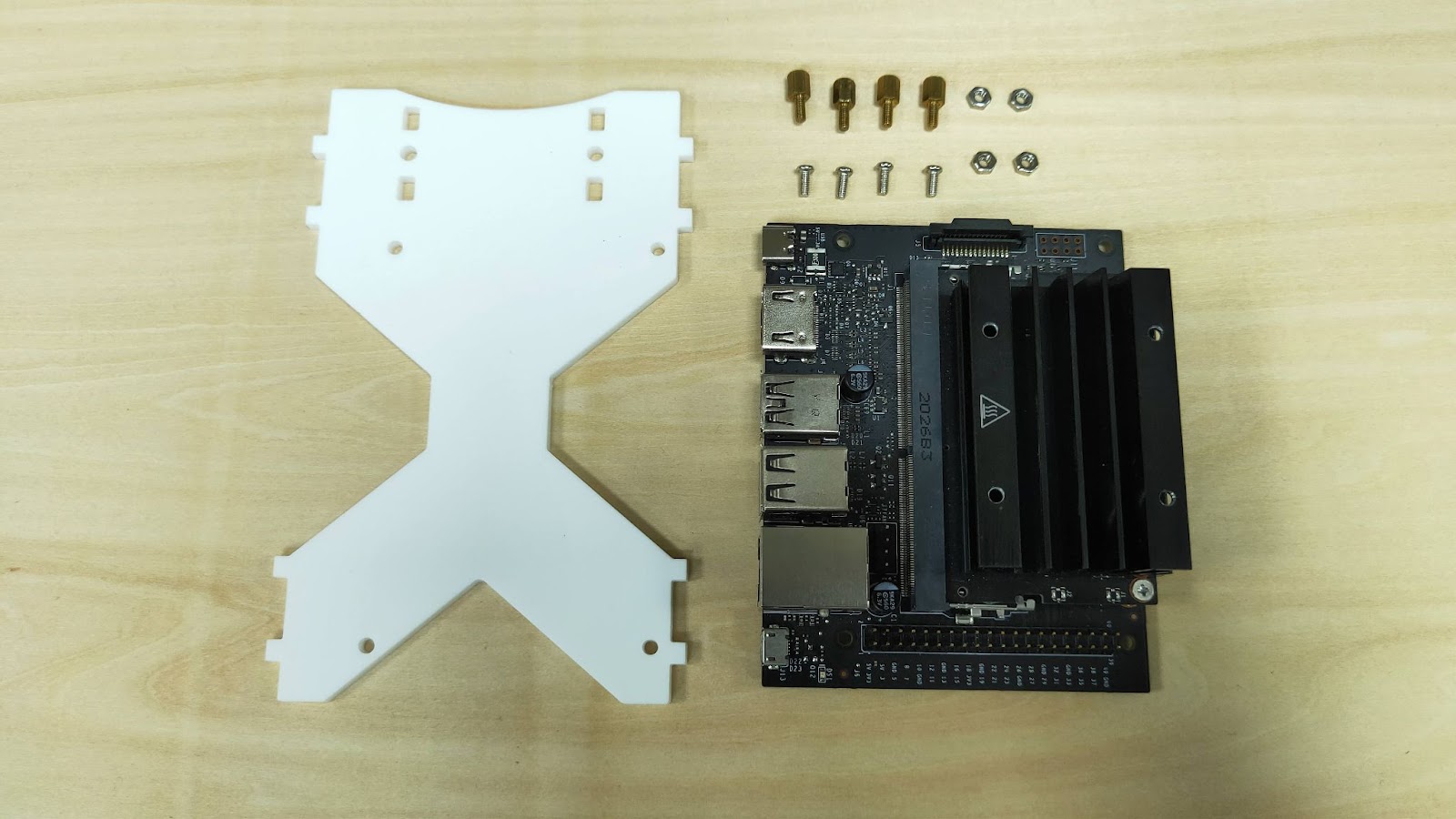
4-1. 準備如下圖壓克力板、Jetson Nano 2GB、螺絲 M2.5x5mm x4、M2.5 銅柱6mm x4、M2.5 螺帽 x4。
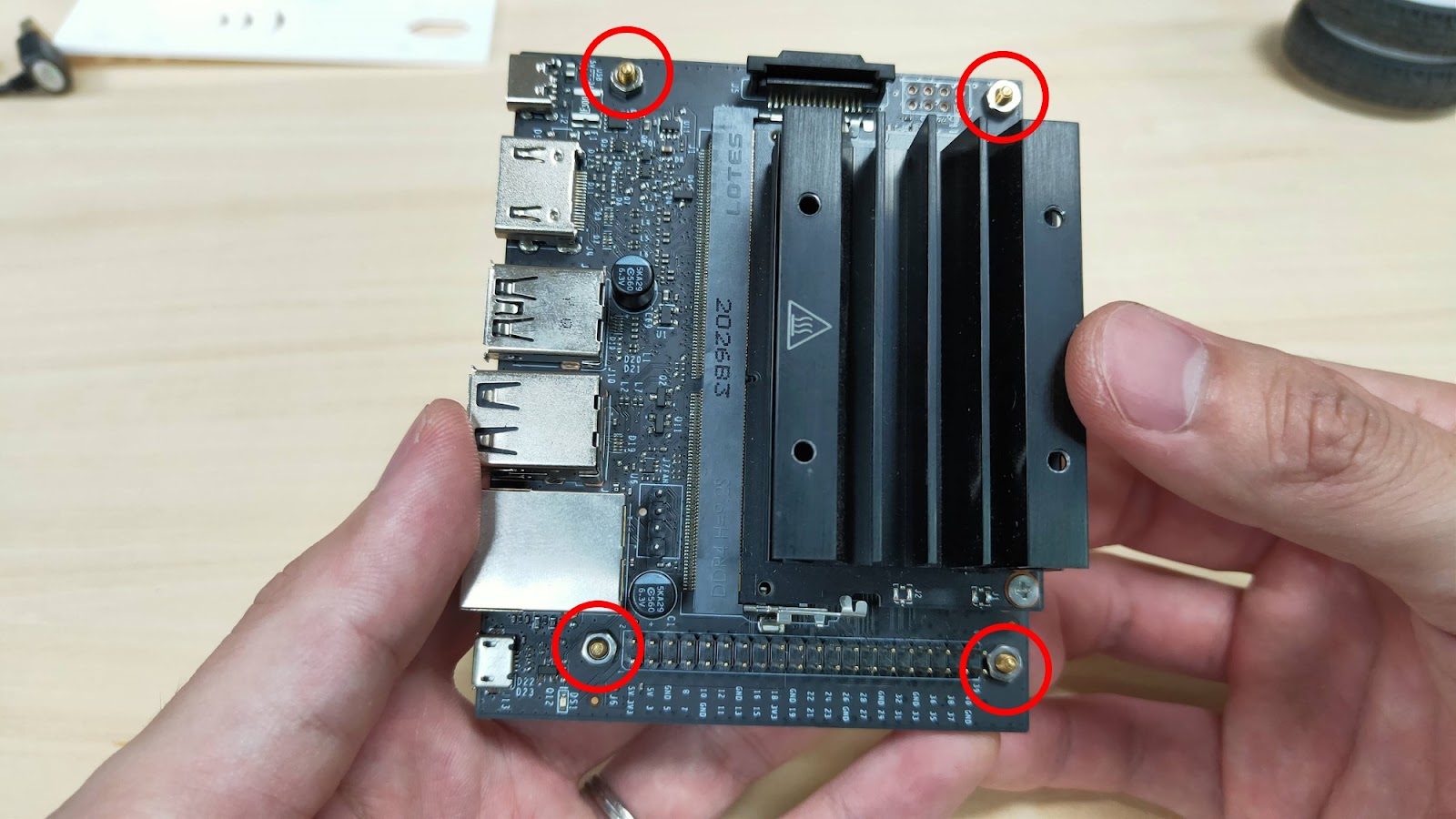
4-2. 拿出M2.5 銅柱6mm x4 與M2.5 螺帽 x4,銅柱從Jetson Nano 2GB 底部穿出再由螺帽固定。
4-3. 依照下圖將Jetson Nano 2GB 對齊壓克力。
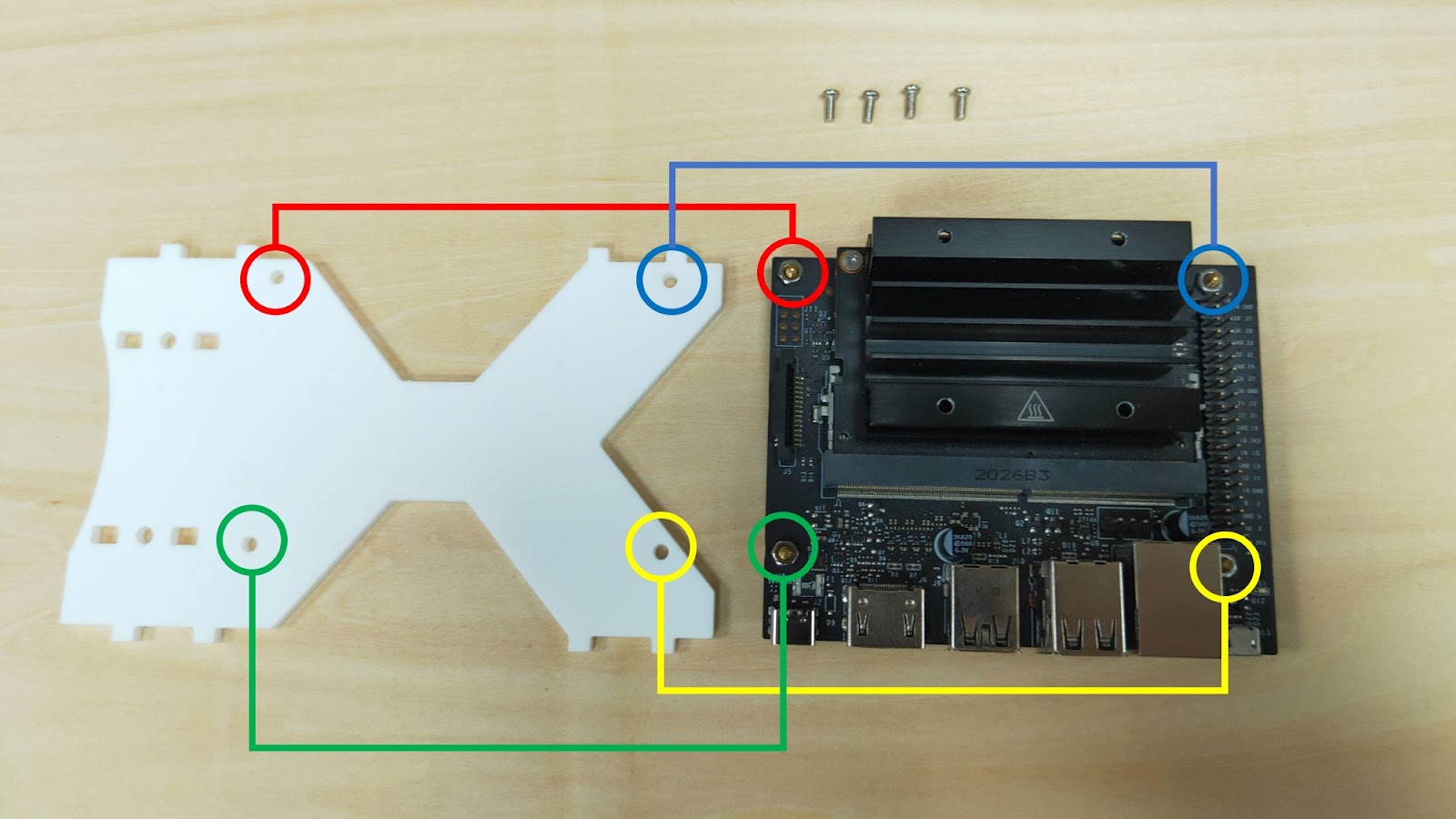
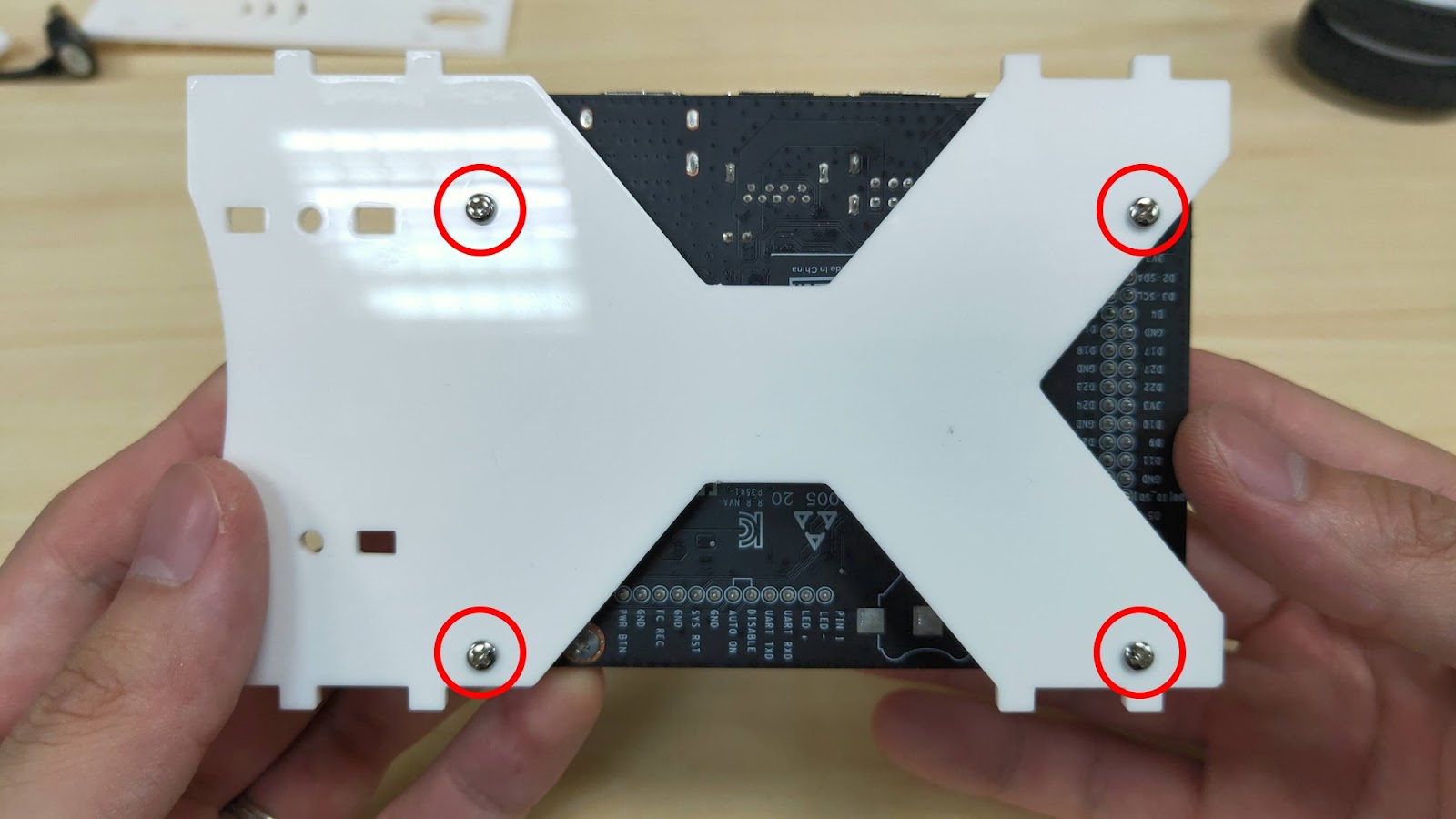
4-4. 用螺絲 M2.5x5mm x4 固定壓克力與Jetson Nano 2GB。
5. 安裝鏡頭與組裝支架
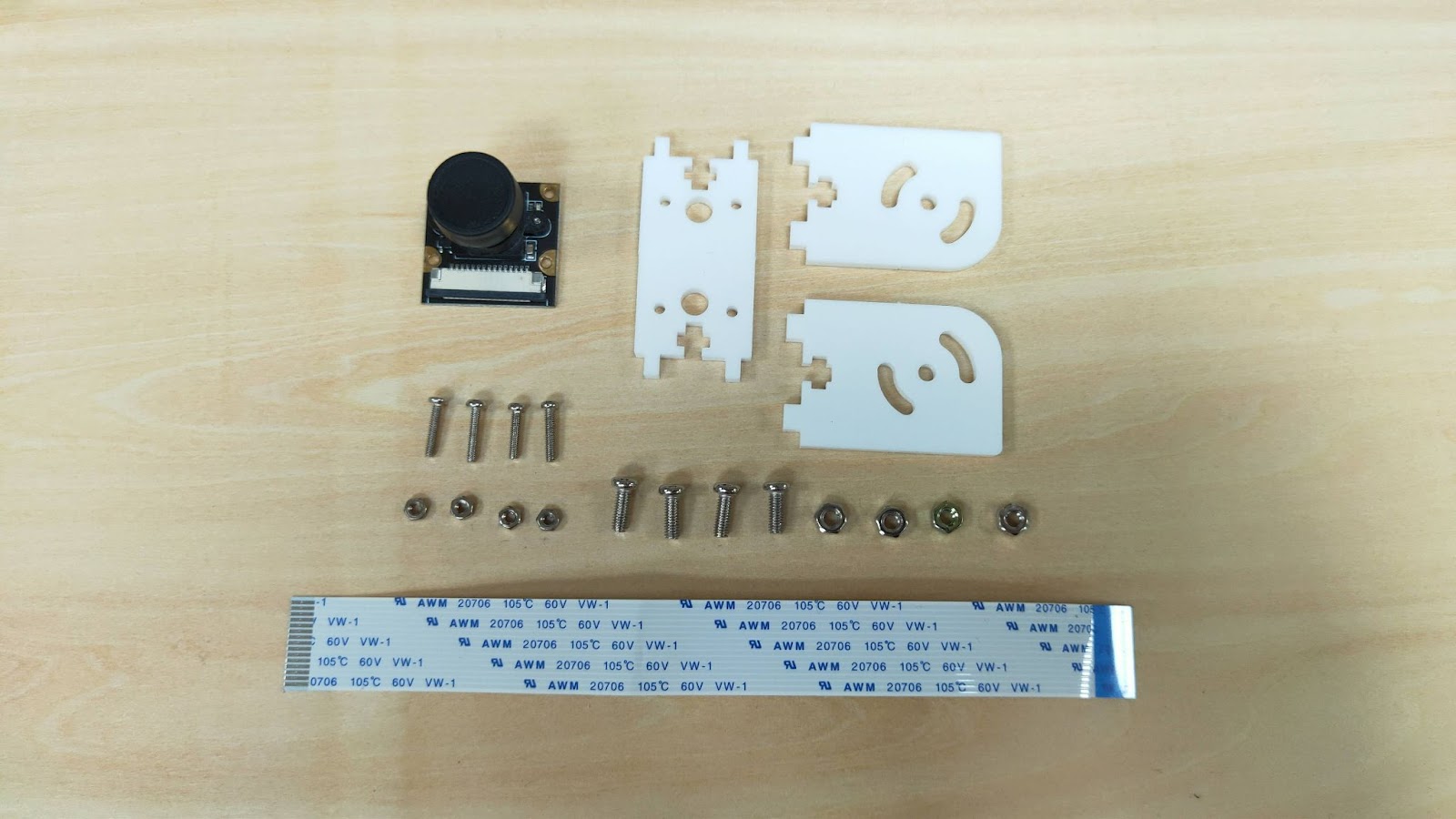
5-1. 準備如下圖壓克力支架、攝影鏡頭、鏡頭排線、螺絲 M2x10mm x4 與M2 螺帽 x4,以及螺絲 M3*8mm x4、M3 螺帽 x4。
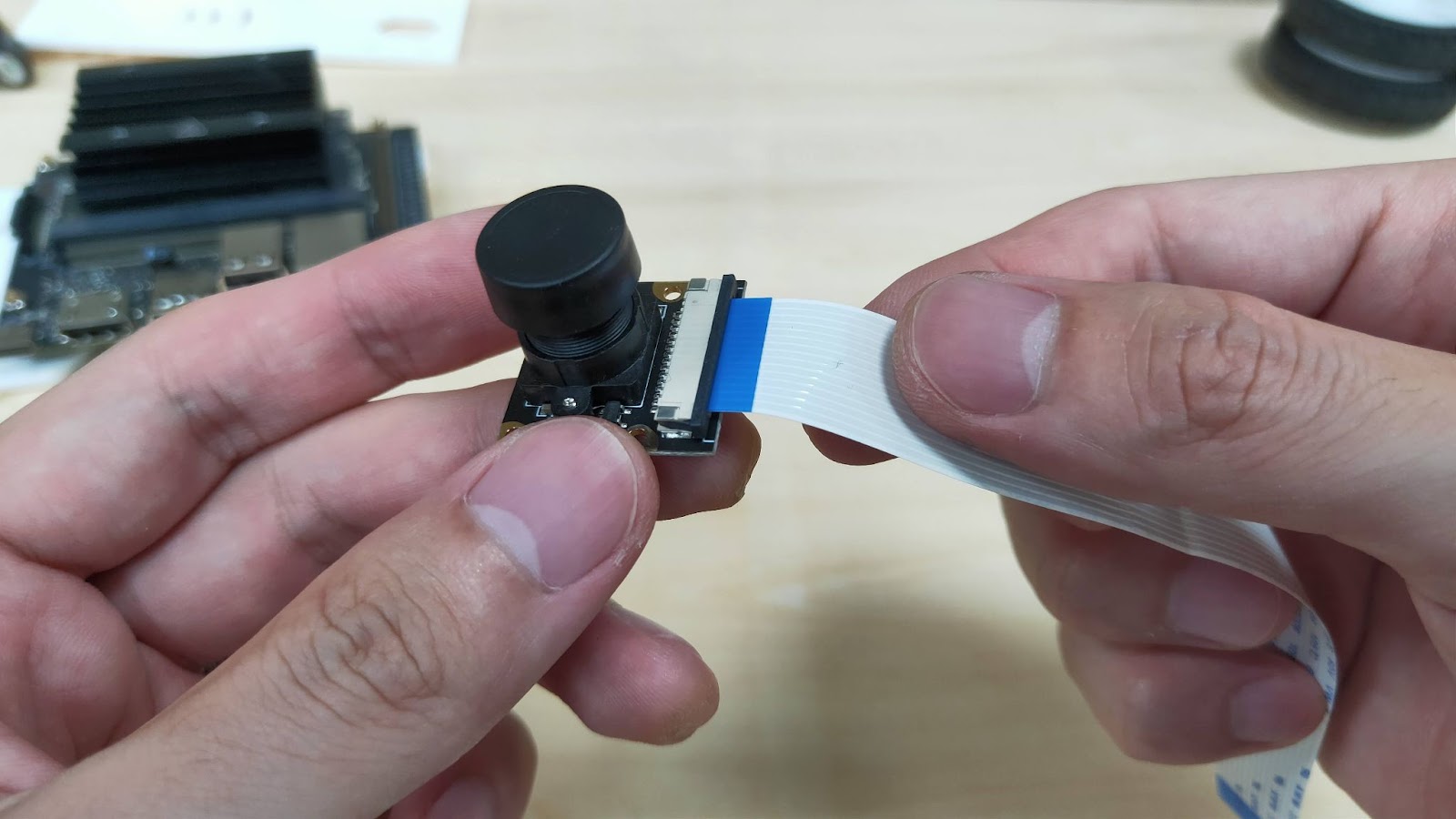
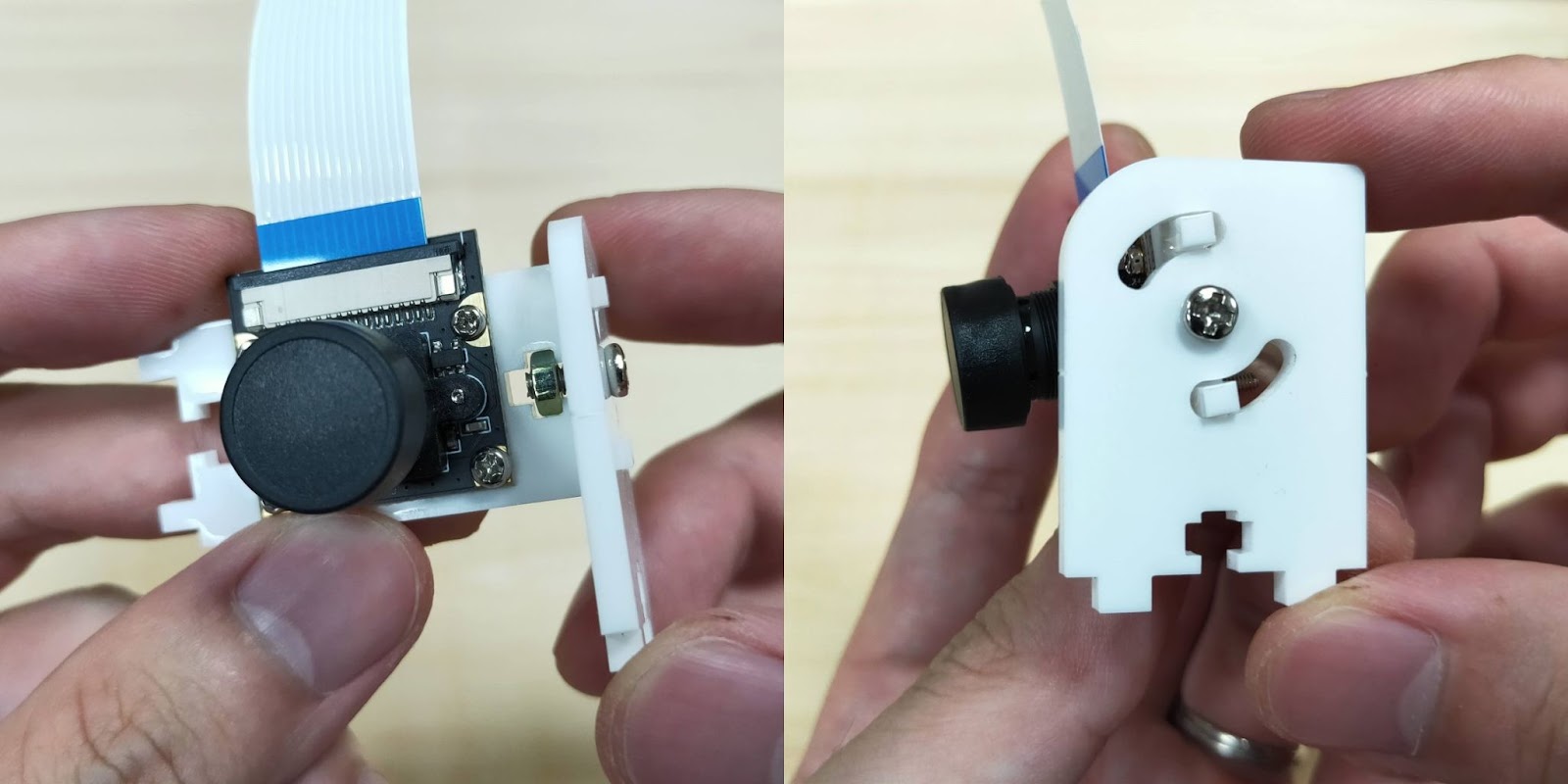
5-2. 連接攝影鏡頭的排線,攝影鏡頭上的排線固定器為塑膠卡件,需小心安裝,避免扳斷卡件。
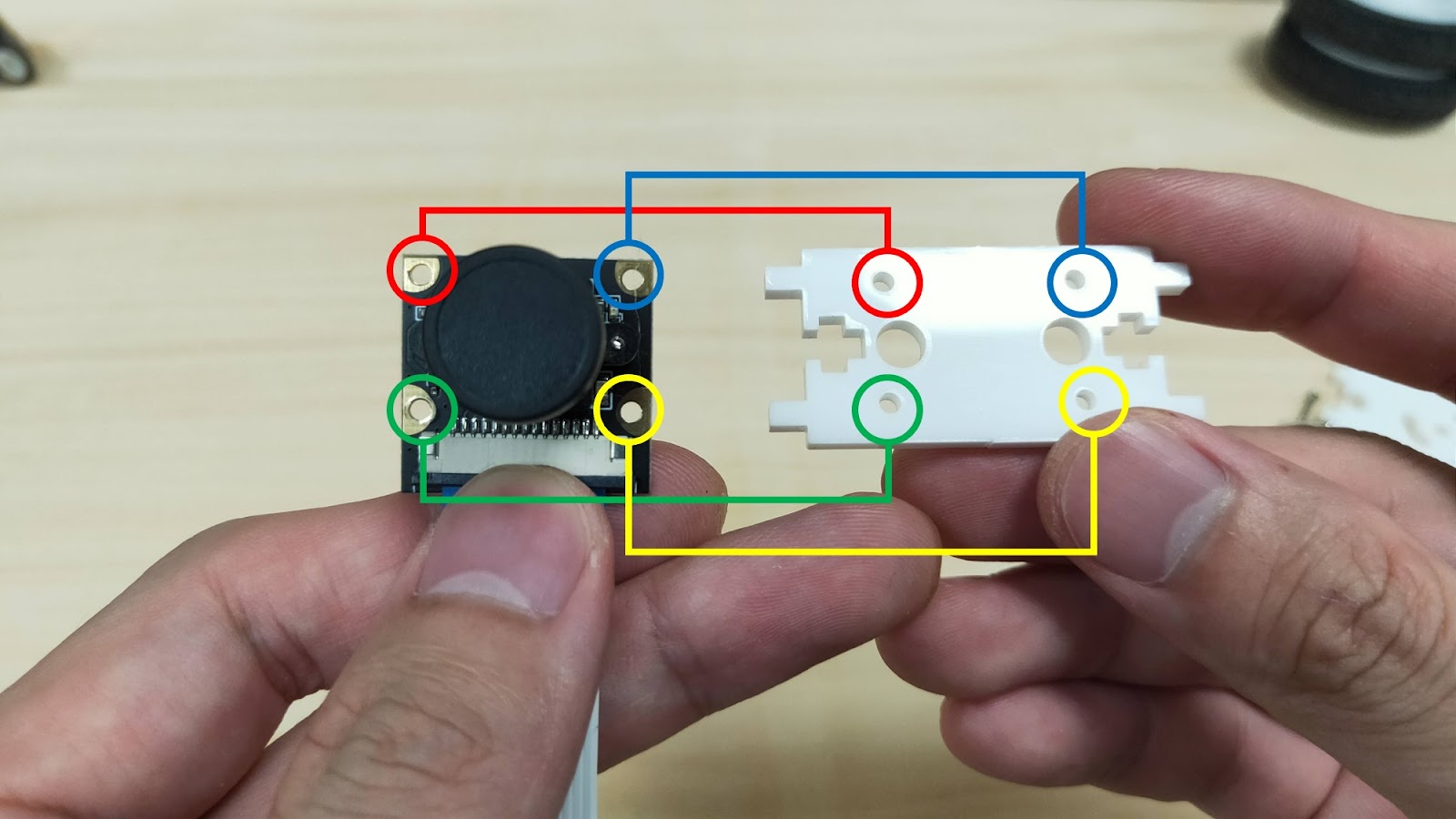
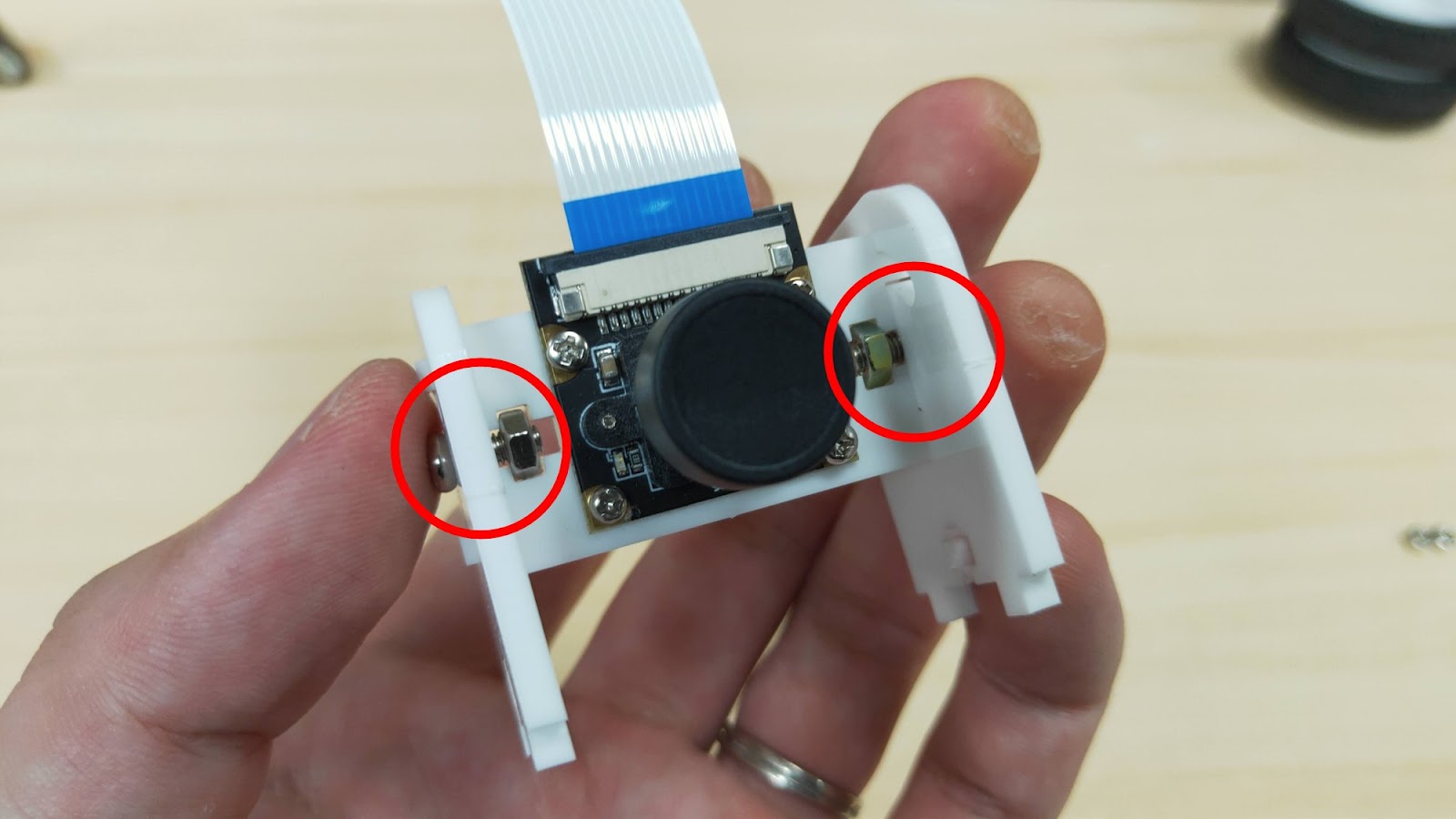
5-3. 將攝影鏡頭依照下圖所示,將螺絲鎖孔對齊壓克力孔洞。
5-4. 用螺絲 M2x10mm x4 與M2 螺帽 x4 固定攝影鏡頭,並拿出一片如下圖的側板。

5-5. 側板安裝位子與方向如下圖所示,使用螺絲 M3*8mm x1、M3 螺帽 x1 來固定,注意攝影鏡頭排線是朝上的方向。
5-6. 安裝另一邊的側板同樣是使用螺絲 M3*8mm x1、M3 螺帽 x1 來固定,方向與剛才的側板對稱。
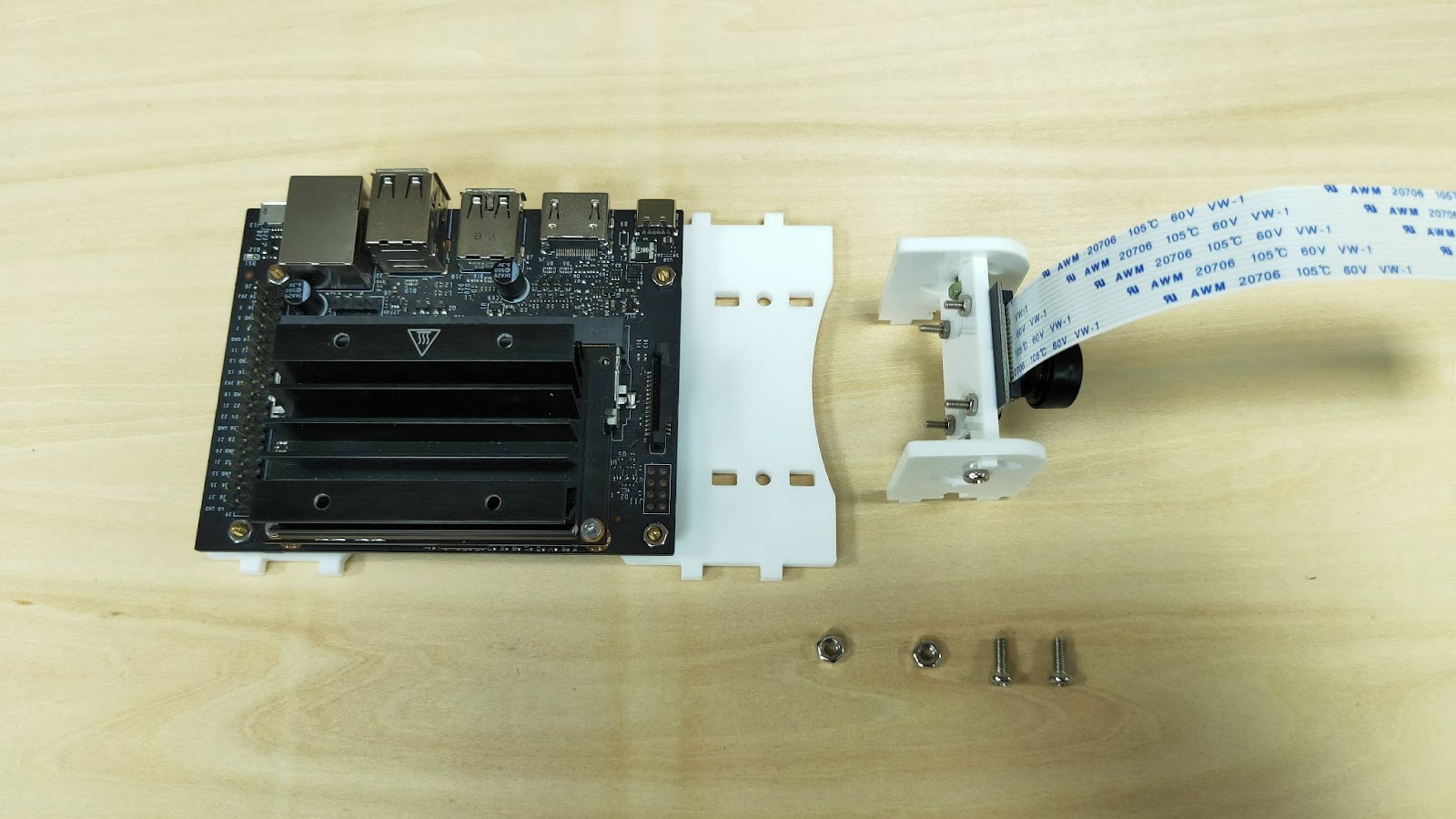
5-7. 接著除了安裝好的鏡頭與支架,拿出剛剛固定在壓克力上的Jetson Nano 2GB,以及剛才安裝鏡頭支架剩下的螺絲 M3*8mm x2、M3 螺帽 x2。
5-8. 先將攝影鏡頭排線的另一端,安裝在Jetson Nano 2GB 上,Jetson Nano 2GB的排線固定器與攝影鏡頭一樣,都是塑膠卡件,需小心安裝,避免扳斷卡件。

5-9. 將鏡頭支架如下圖,與固定Jetson Nano 2GB 壓克力板上的孔洞對齊,並依照孔洞安裝上去。

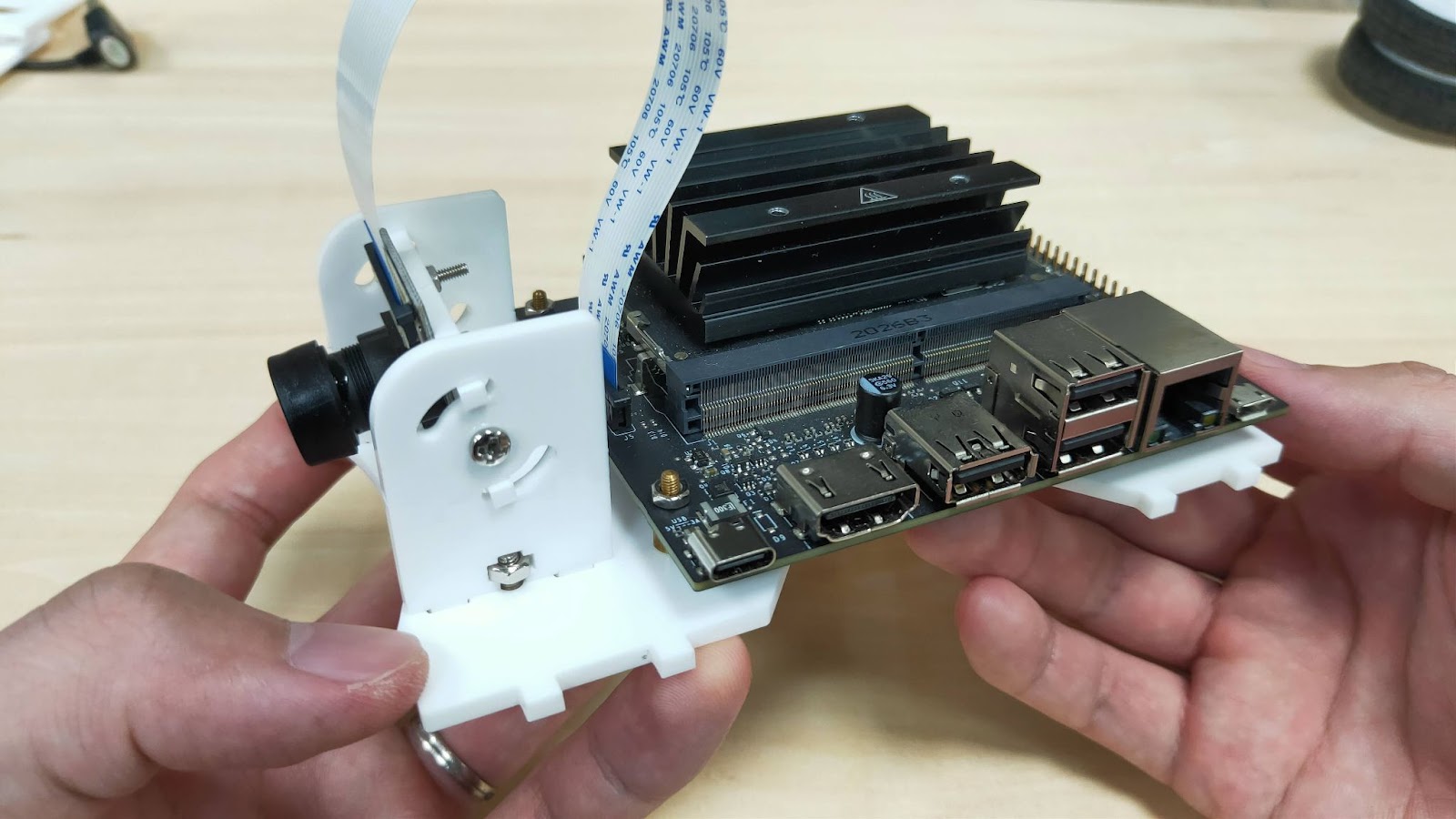
5-10. 使用螺絲 M3*8mm x1、M3 螺帽 x1 將鏡頭支架固定在壓克力底板上。

5-11. 支架另一側同樣使用螺絲 M3*8mm x1、M3 螺帽 x1,將鏡頭支架固定在壓克力底板上。
6. 安裝萬向輪
6-1. 準備如下圖所示的壓克力板、萬向輪、螺絲 M3*8mm x2 與M3 螺帽 x2。
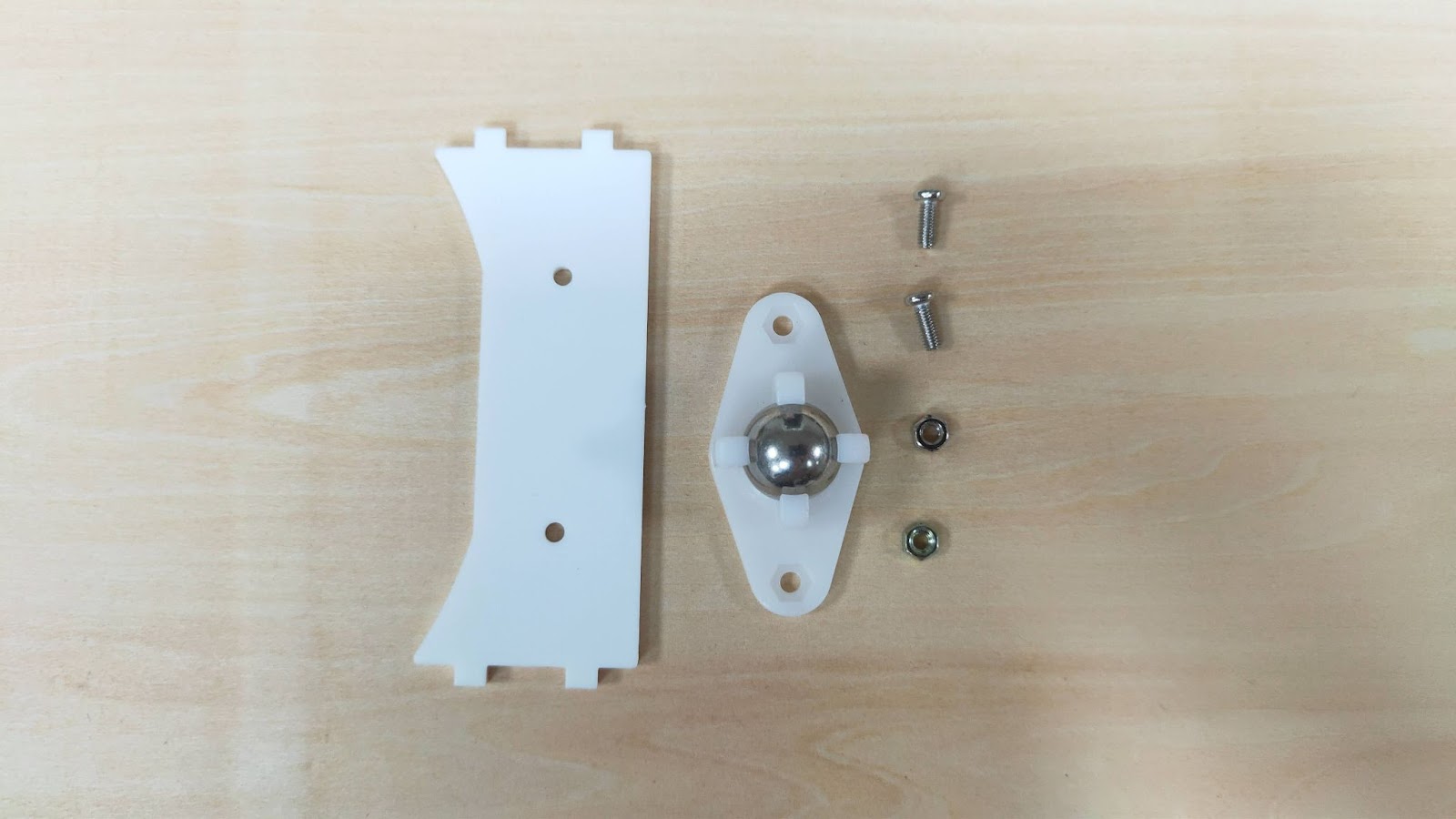
6-2. 將萬向輪如下圖固定在壓克力上,螺帽的位子在全向輪的這一側。

7. 黏貼魔鬼氈
7-1. 將魔鬼氈隨己意黏貼在行動電源上與裝有馬達驅動板的另一面,電池將會使用魔鬼氈黏貼在這一面上。

8. 組裝各壓克力板
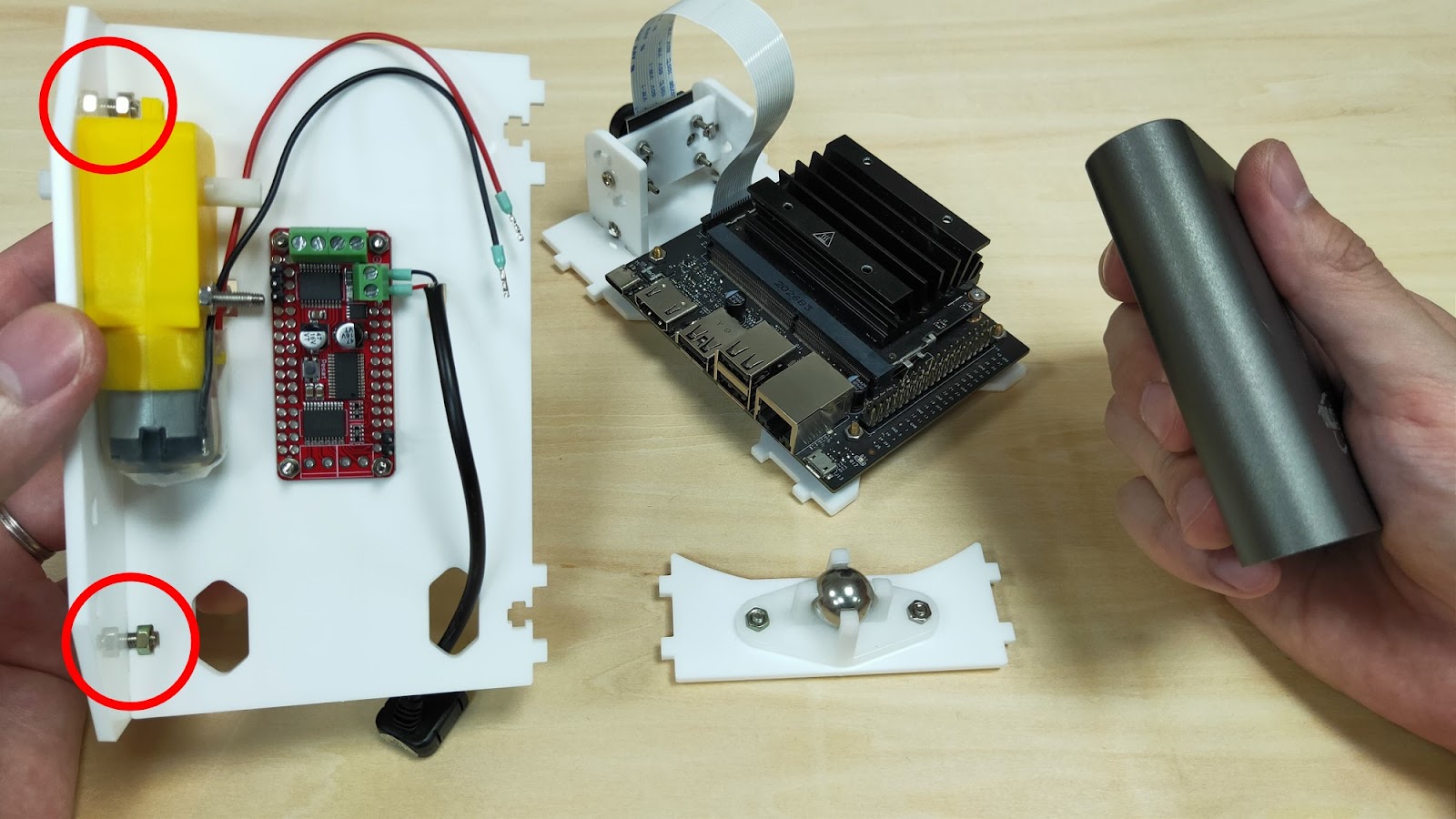
8-1. 準備如下圖所示之壓克力組件,以及螺絲 M3*8mm x4 與M3 螺帽 x4,裝有馬達驅動板的壓克力會裝在如下圖所示側板紅框的位子。

8-2. 組裝後使用螺絲 M3*8mm x2 與M3 螺帽 x2 依照下圖位子固定。
8-3. 固定完成後先別急著固定另一側,請先拿出行動電源。
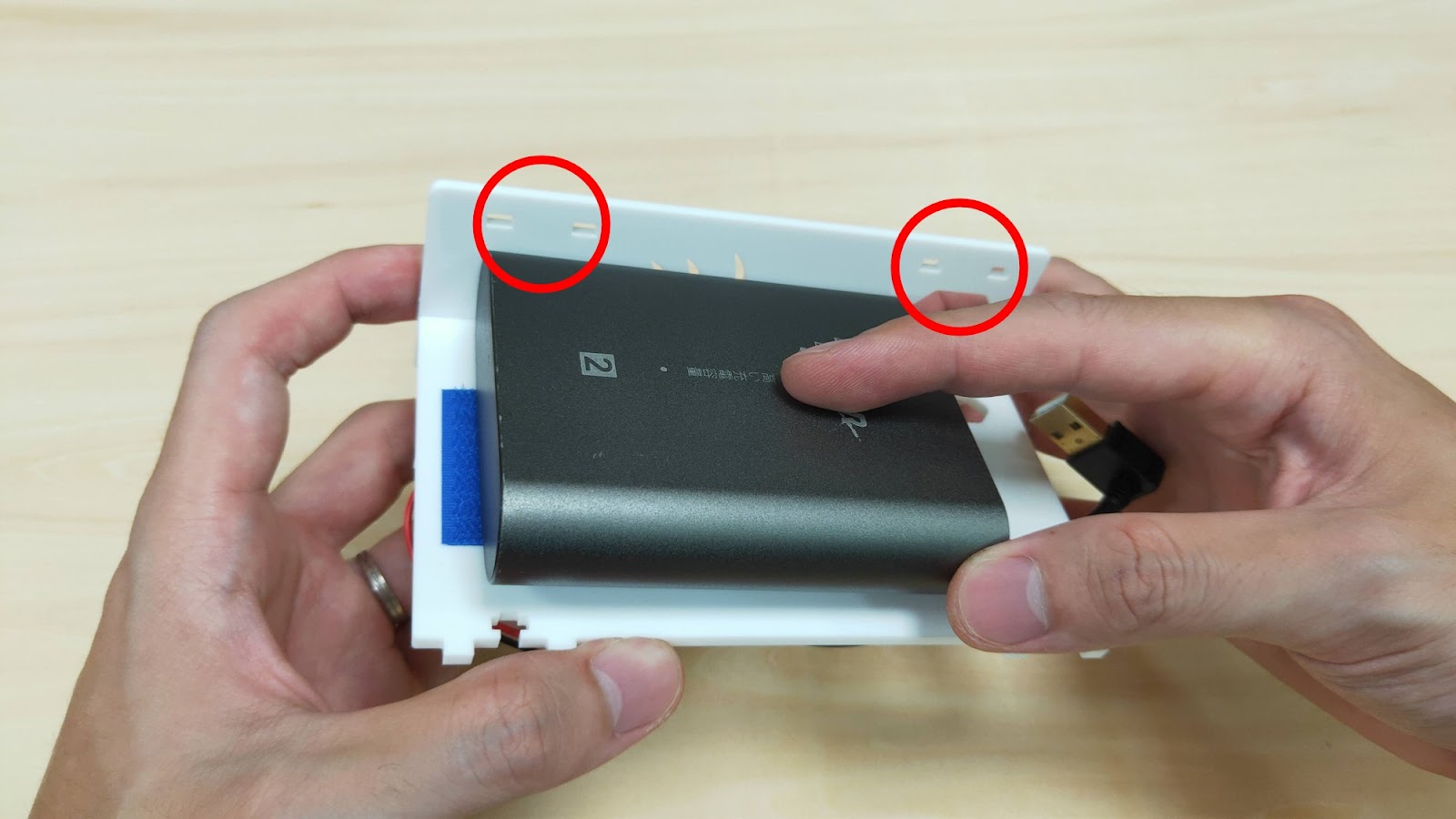
8-4. 將行動電源黏於壓克力板原先黏貼魔鬼氈的位子。

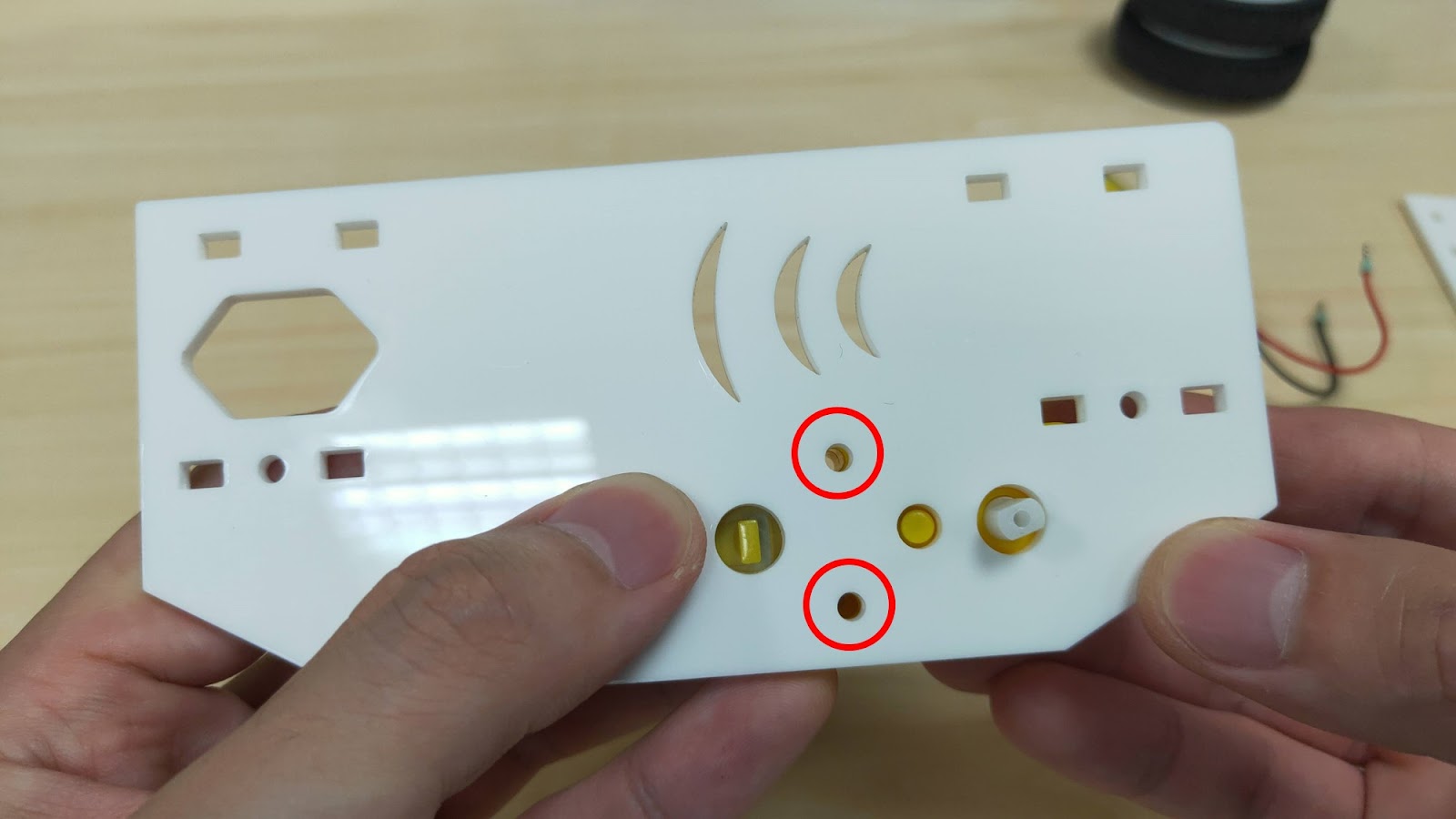
8-5. 下圖紅圈所示孔洞為連接Jetson Nano 2GB 壓克力板的位子。
8-6. 將裝有Jetson Nano 2GB 與鏡頭支架的壓克力板,依照上圖位子裝上去,拿出裝有萬向輪的壓克力安裝在下方位子。
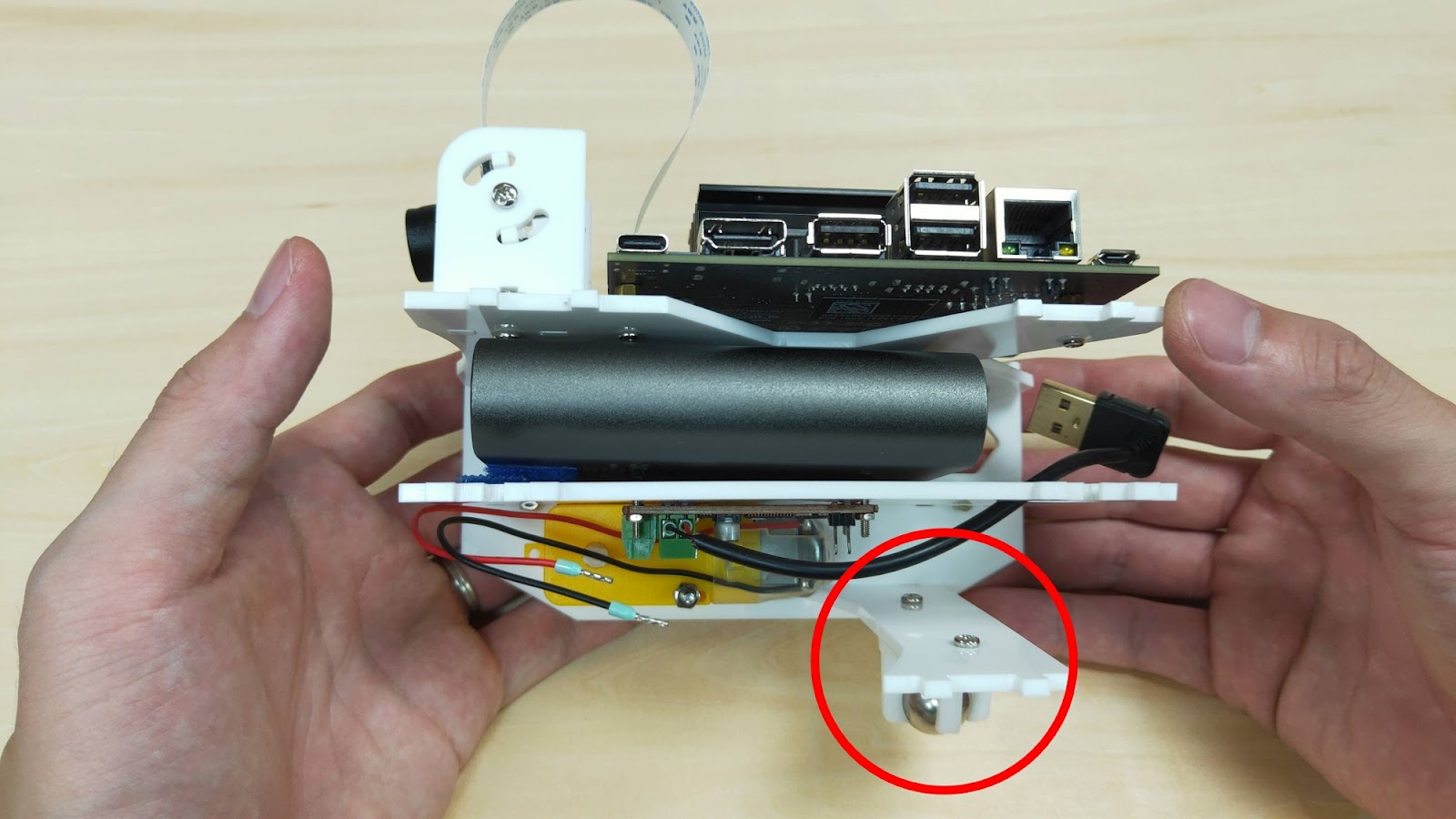
8-7. 調整各板位子對齊另一片裝有馬達的側板組裝起來,下圖紅圈位子為螺絲鎖點,使用螺絲 M3*8mm x2 與M3 螺帽 x2 將其固定。

8-8. 前端螺絲鎖孔固定後如下圖,因為是機構組裝的最後階段,所以組裝過程空間較為不足,請耐心安裝。
8-9. 後端螺絲鎖孔固定後如下圖,因為是機構組裝的最後階段,所以組裝過程空間較為不足,請耐心安裝。

9. 安裝各連接線
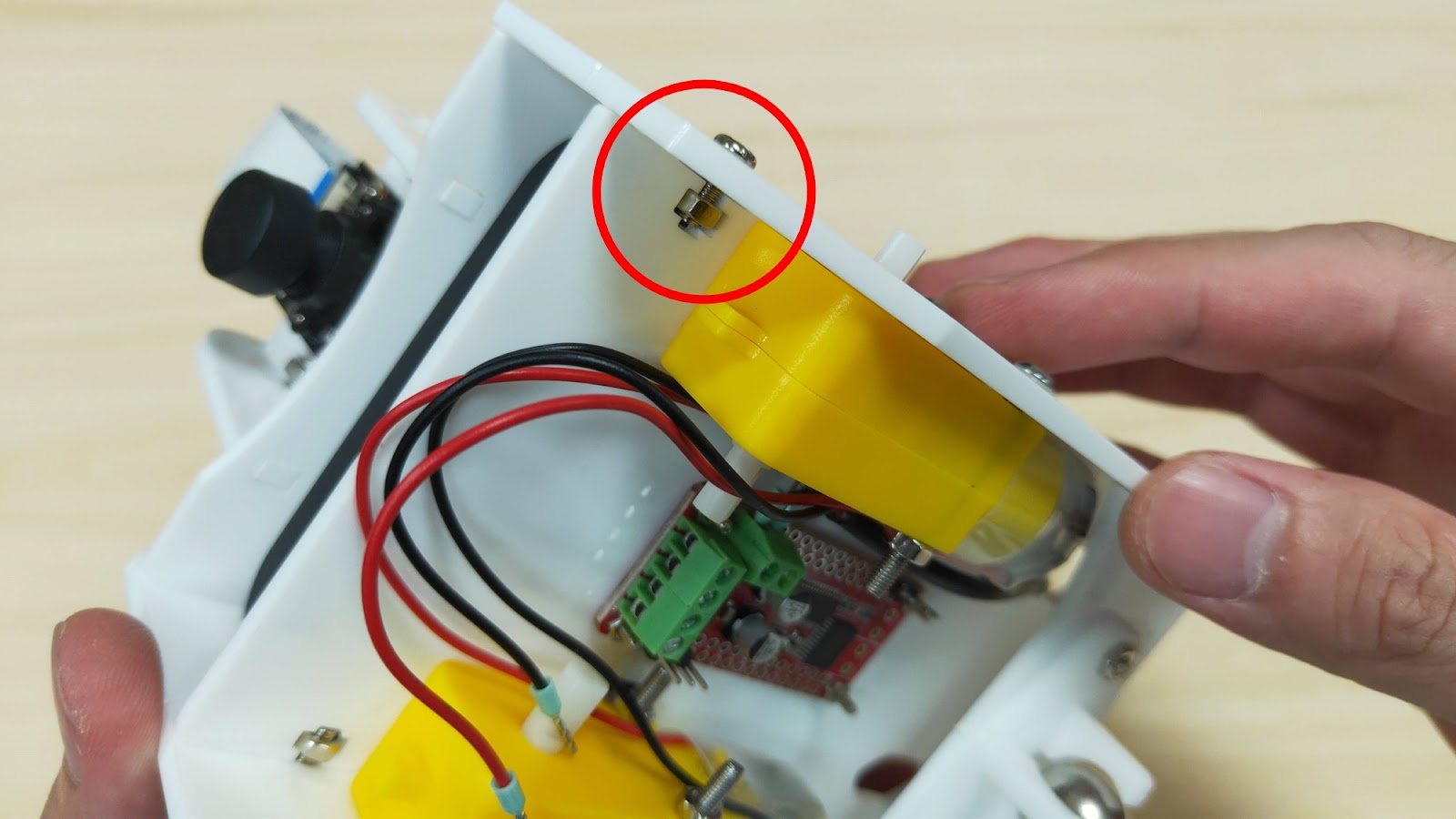
9-1. 首先安裝馬達驅動板的電源線,電源線如下圖紅框所示。

9-2. 將馬達驅動板的電源線,安裝在行動電源的供電插座上。

9-3. 拿出杜邦母座5P to 2+3P 的連接線,這條連接線是用來連接Jetson Nano 2GB 與馬達驅動板的。
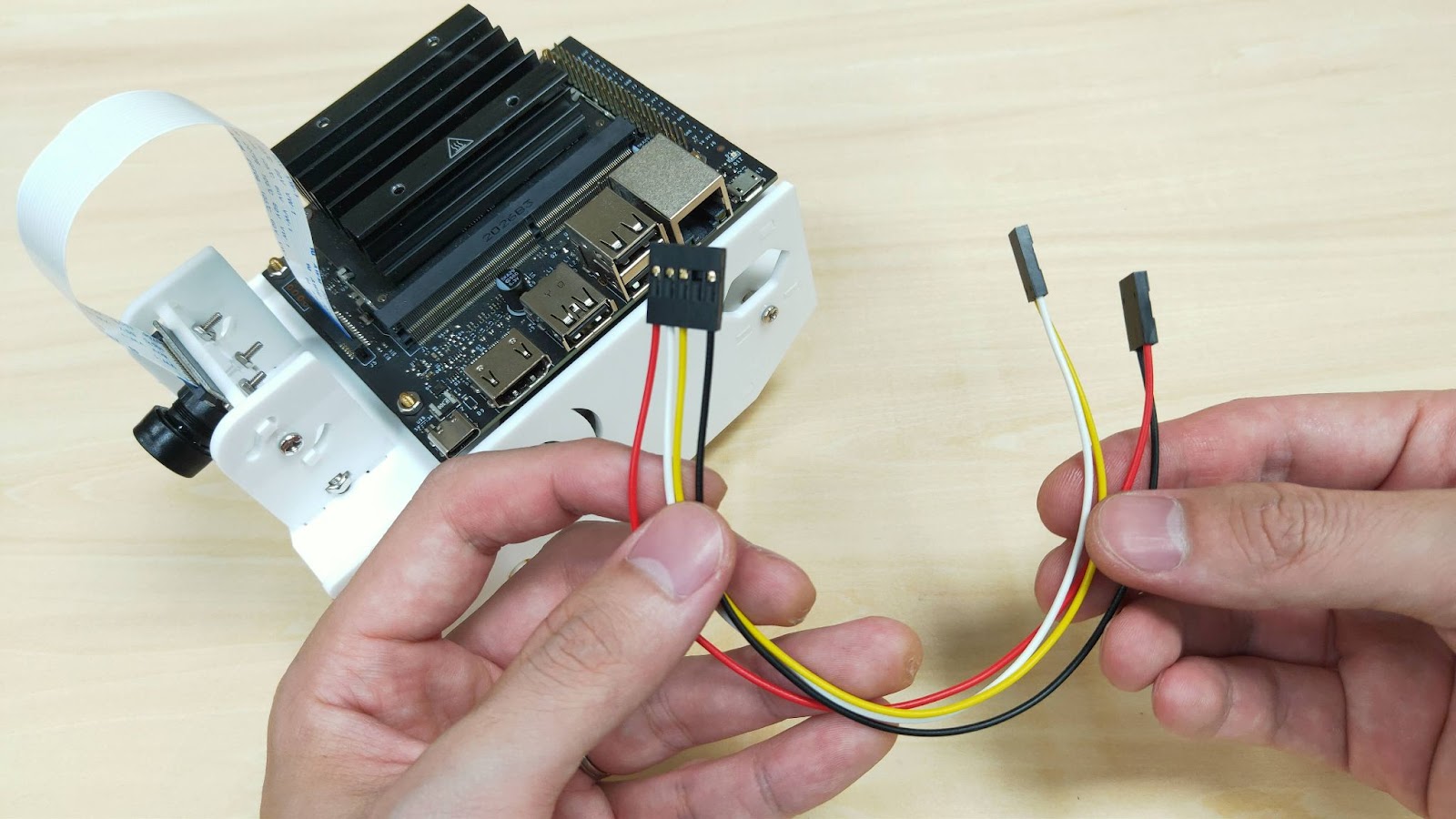
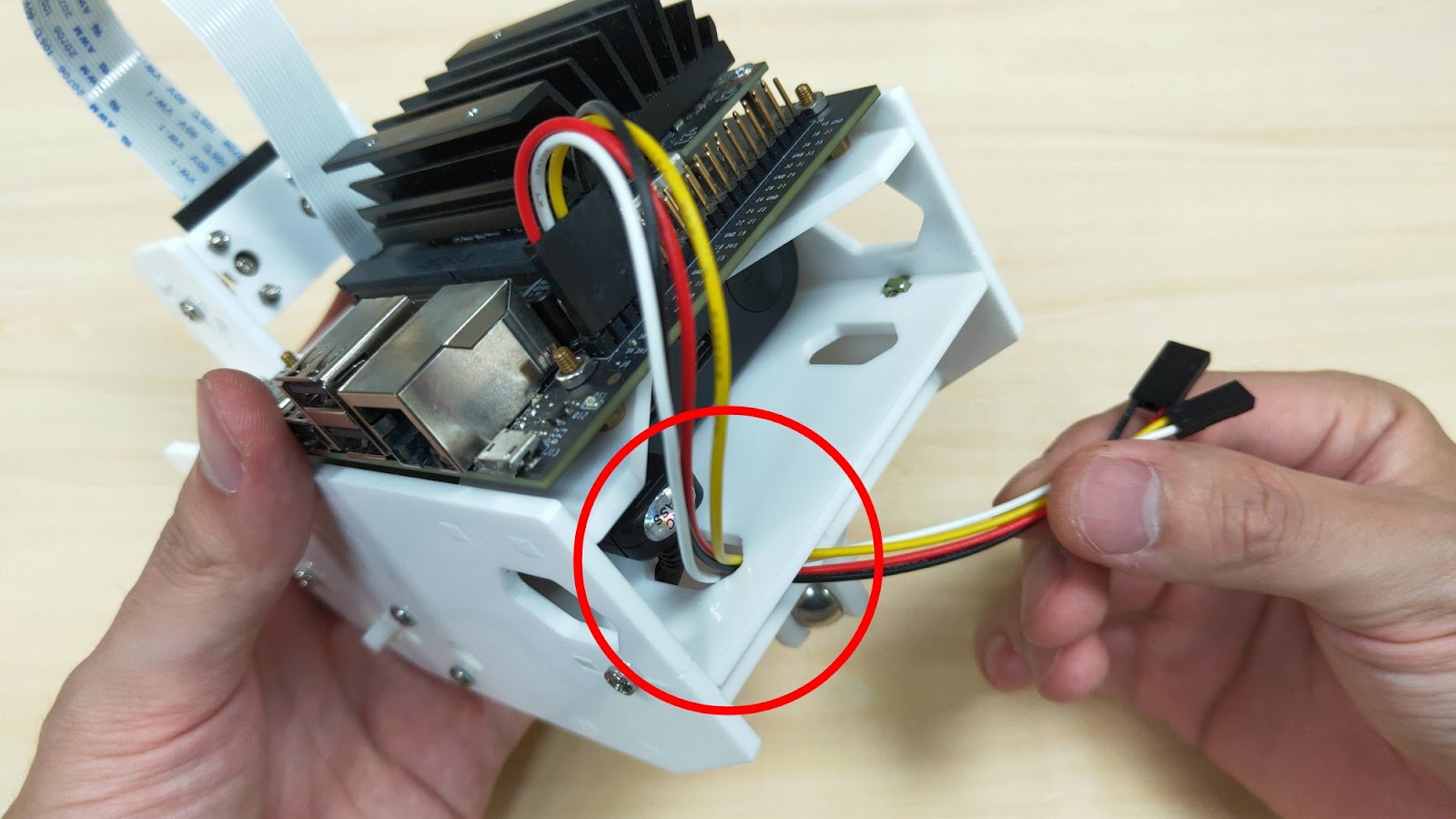
9-4. 連接線5P 的那一端會安裝在Jetson Nano 2GB 的排針上。

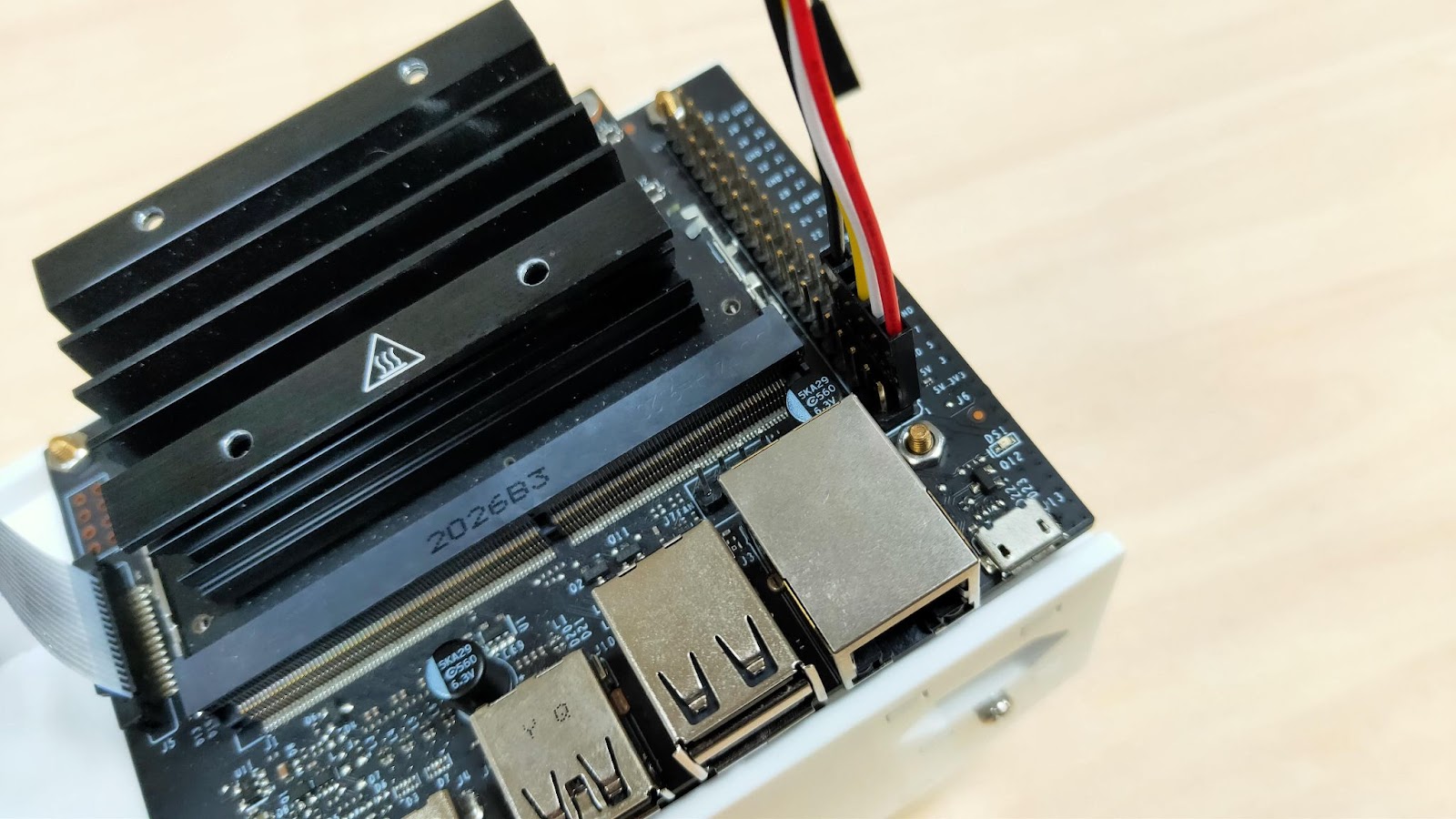
連接位子如下圖所示,安裝在最外側的排針,由下而上依序對應連接線的顏色(紅色、白色、黃色、黑色)。

安裝完成如下圖所示:
9-5. 將杜邦母座5P to 2+3P 的連接線另一端,穿過底板孔洞到車底。
9-6. 連接線這端分為兩組線,分別是代表電源的3P 母座(紅、黑線),以及代表訊號的2P 母座(白、黃線)。
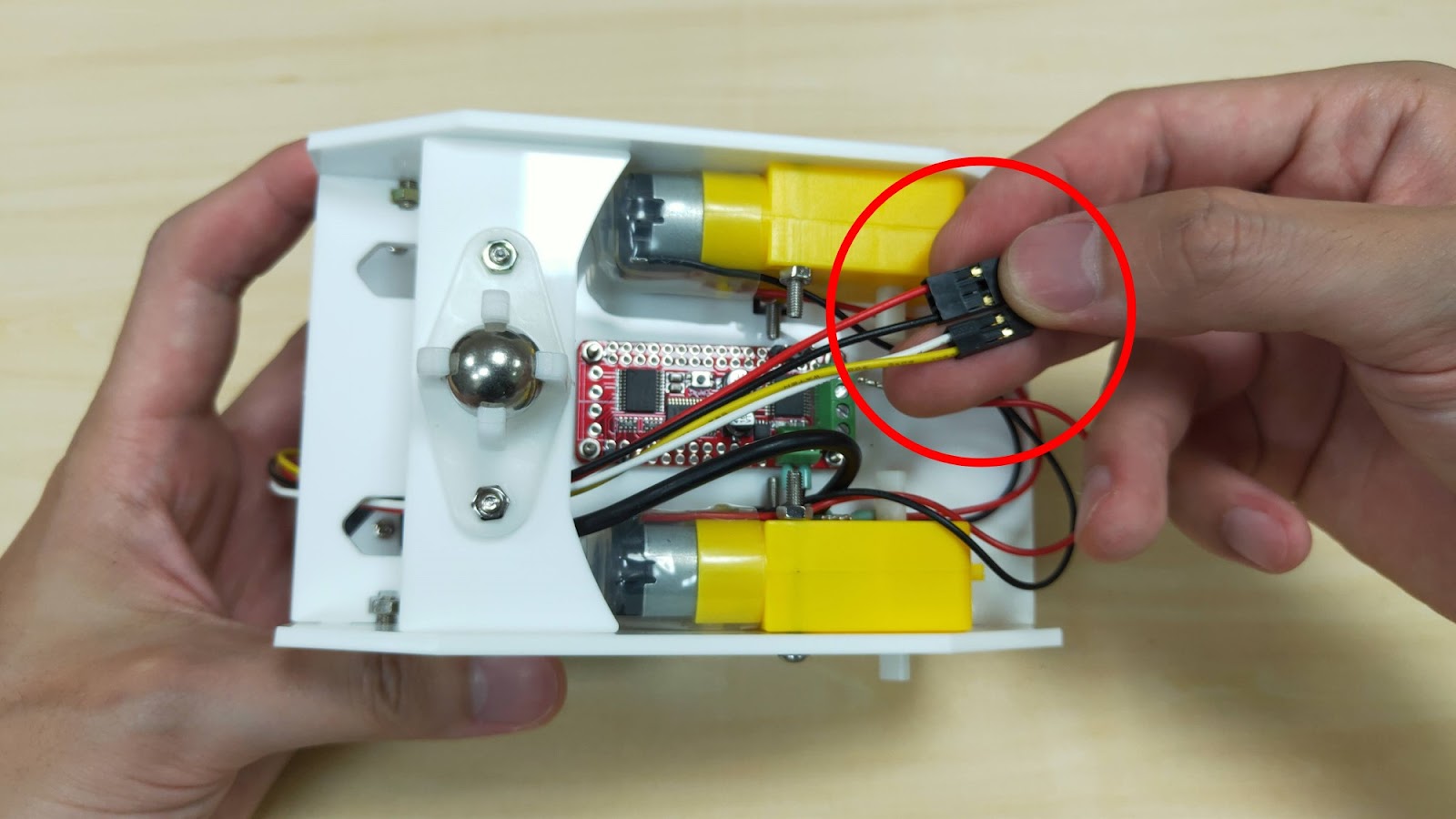
9-7. 將代表電源的3P 母座(紅、黑線),如下圖安裝在靠近歐式端子座的排針上,紅色線靠近歐式端子座的位子。

9-8. 代表訊號的2P 母座(白、黃線),如下圖安裝在靠近螺絲的排針上,白色線靠近螺絲的位子。

9-9. 請用一字螺絲起子將馬達連接線固定在歐式端子座上,順序如下圖所示。

9-10. 拿出USB to Type C 連接線,並安裝在行動電源的供電插座上。

10. 安裝其餘配件
10-1. 將無線網卡插入USB 插槽。

10-2. 將兩個輪子安裝上去。

11. 完成圖
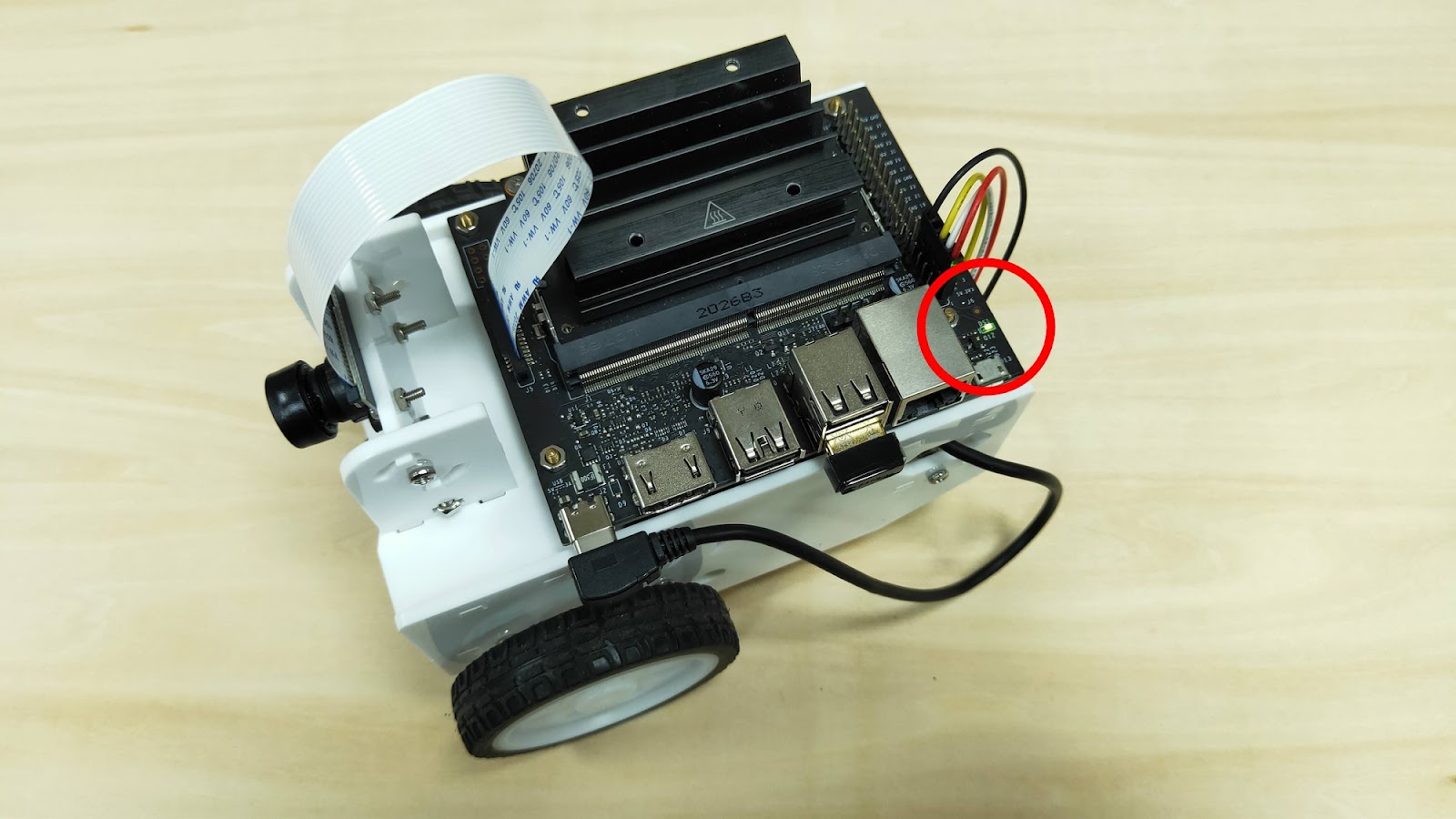
11-1. 需要供電時將USB Type C 連接線接上Jetson Nano 2GB 的USB Type C 供電插座上。

11-2. 正常供電時Jetson Nano 2GB 的電源LED 燈會亮起。
以上就是JetBot AI自駕車套件的組裝說明,接下來還會有一系列關於JetBot AI自駕車套件的實際操作的教學文章,有興趣的夥伴們要持續支持與關注我們喔!