

想要開始學習設計一個無人自駕車的時候,卻總是在傷腦筋一個問題 : 要讓這台無人自駕車跑在哪裡呢?
自駕車場域模擬套件組,便是一款為了幫助大家學習無人自駕車的概念,所設計的場域模擬設備,本篇要帶大家來認識套件組的設計原理、使用方法以及程式撰寫。

場域模擬套件組-上視圖 
場域模擬套件組-內容物
自駕車場域模擬套件組的配備
紅綠燈 x 2
柵欄 x 1
停車場標誌 x 1
搖桿 x 1
MicroUSB傳輸線 x 2
精密六角板手組(7支組) x 1
膠柄十字起子 #000 x 1
3A鹼性電池 x 2
MG996R 55G金屬齒輪伺服器若干零件
本次的場域模擬套件組的微控制器,選用較為方便使用的 micro:bit ,搭配 Micro:bit的擴展版 Mbitbot mini ,這樣想要修改模擬場域的環境因素時,便能夠快速地修改。在自駕車場域模擬套件組裡,紅綠燈與柵欄皆是使用此種搭配組合。

micro:bit 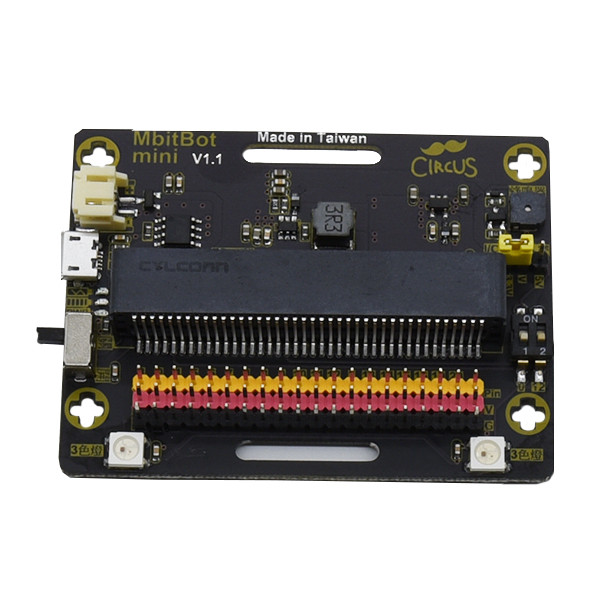
MbitBot mini
電源設計
micro:bit 本身可以使用 3.7V的鋰電池 供電,並且 Mbitbot mini 的 MicroUSB 插槽,能夠為 3.7 V的鋰電池充電,這樣就節省了需要多準備一個充電器的步驟了。
操作
無人自駕場域模擬的預設操作方法,是利用搖桿,控制紅綠燈與柵欄。
操作的步驟如下 :
1. 拿起搖桿,按下搖桿左上方的 「A」按鈕
2. 開啟搖桿右下方的電源,待看到搖桿上的微控制器出現「M」字樣後,即可放開左上方的「A」按鈕。「M」代表的是「Main controller 」意思。接著,微控制器會持續出現「A」字樣,這代表的是現在可以控制 紅綠燈A的燈號。
3. 開啟兩個紅綠燈的電源,開關在紅綠燈的右側面。開啟電源後,即可發現紅綠燈的電源指示燈(藍燈)亮起。

4. 柵欄請先確認是否保持在閉合(與地面平行)狀態。確認完畢後,開啟柵欄的電源,開關在柵欄的右側面。開啟電源後,即可發現柵欄的電源指示燈亮起
5. 按下遙控器上的紅、黃、綠按鈕,即可變更紅綠燈的燈號。請隨時注意搖桿上的微控制器所顯示的英文字母,以便控制相對應的紅綠燈。若要關閉紅綠燈燈號,請按下黑色按鈕。
6. 若要控制另外一個紅綠燈,請按下搖桿右方的「X」按鈕,這時會發現搖桿上的微控制器英文會顯示成「B」,這代表的是現在是控制紅綠燈B的狀態。
7. 柵欄的操控方法,只要按下搖桿右方的「Y」按鈕,便可以控制柵欄的開合狀態。搖桿上的微控制器也會出現相對應的開合狀態,若是發現搖桿上的微控制器圖案,與實際上柵欄的開合狀態不同,則需要重新校正 Mg90的伺服機。
所有組件都可順利操作後,便可以攤開附贈的地圖,依照自己設定的實驗條件,開始無人自駕車的測試囉!
程式撰寫部分
搖桿上的微控制器支援 MakeCode與 Python ,熟悉這兩樣工具的朋友們可以自行設計出符合自己需求的場域模擬設備組。可參考本文章操作的範例程式碼。
盒裝特別選用可以疊加的設計,讓使用者在之後有新增設備時,可自行疊加盒子,讓設備的攜帶更加方便喔!

喜歡我們文章的朋友們,請多多支持與分享唷!



