
7. 安裝開關門機構
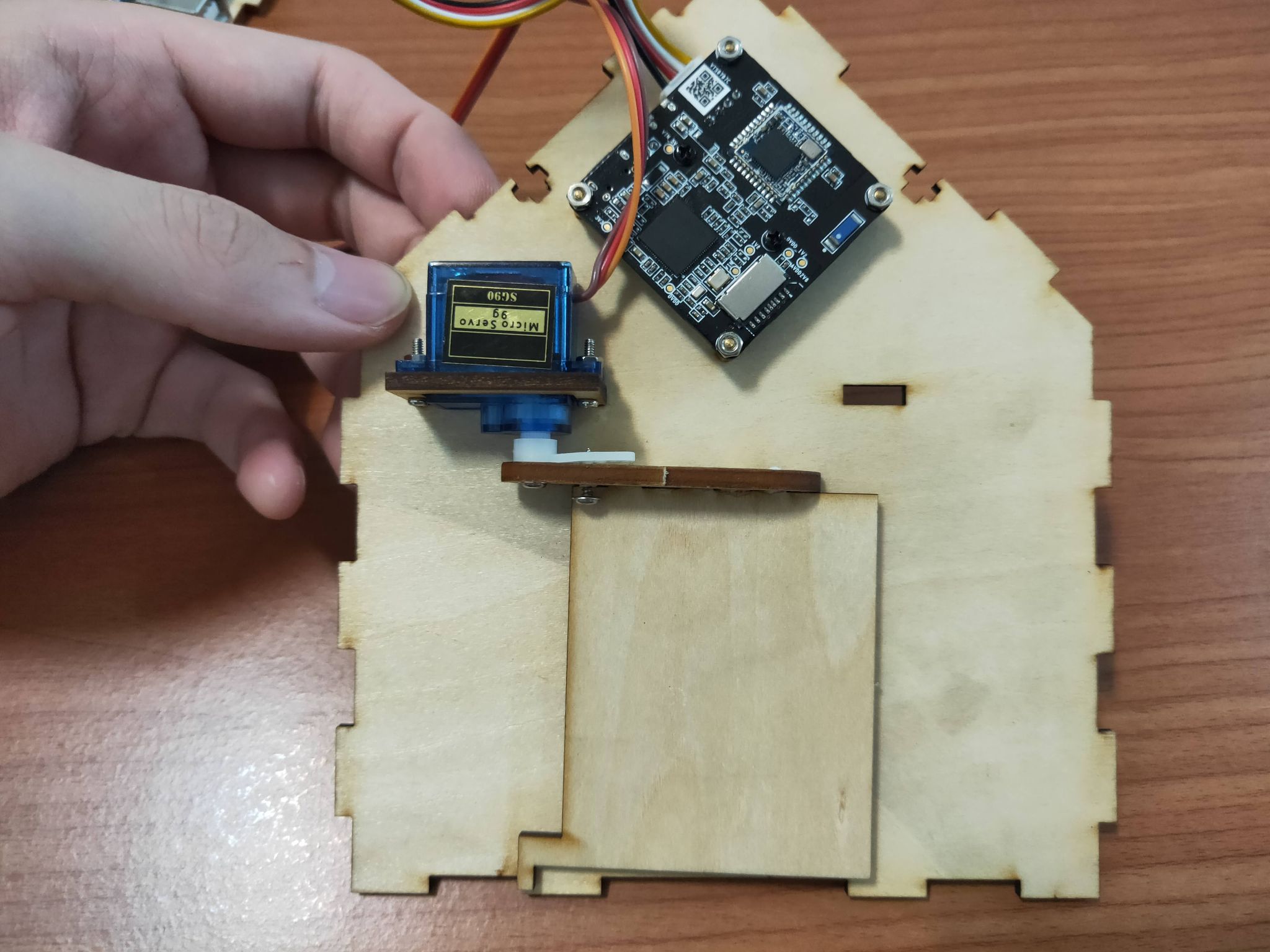
7-1. 拿出剛剛黏好的伺服馬達與門機構,對準連接Pixetto木板上的兩個孔洞。
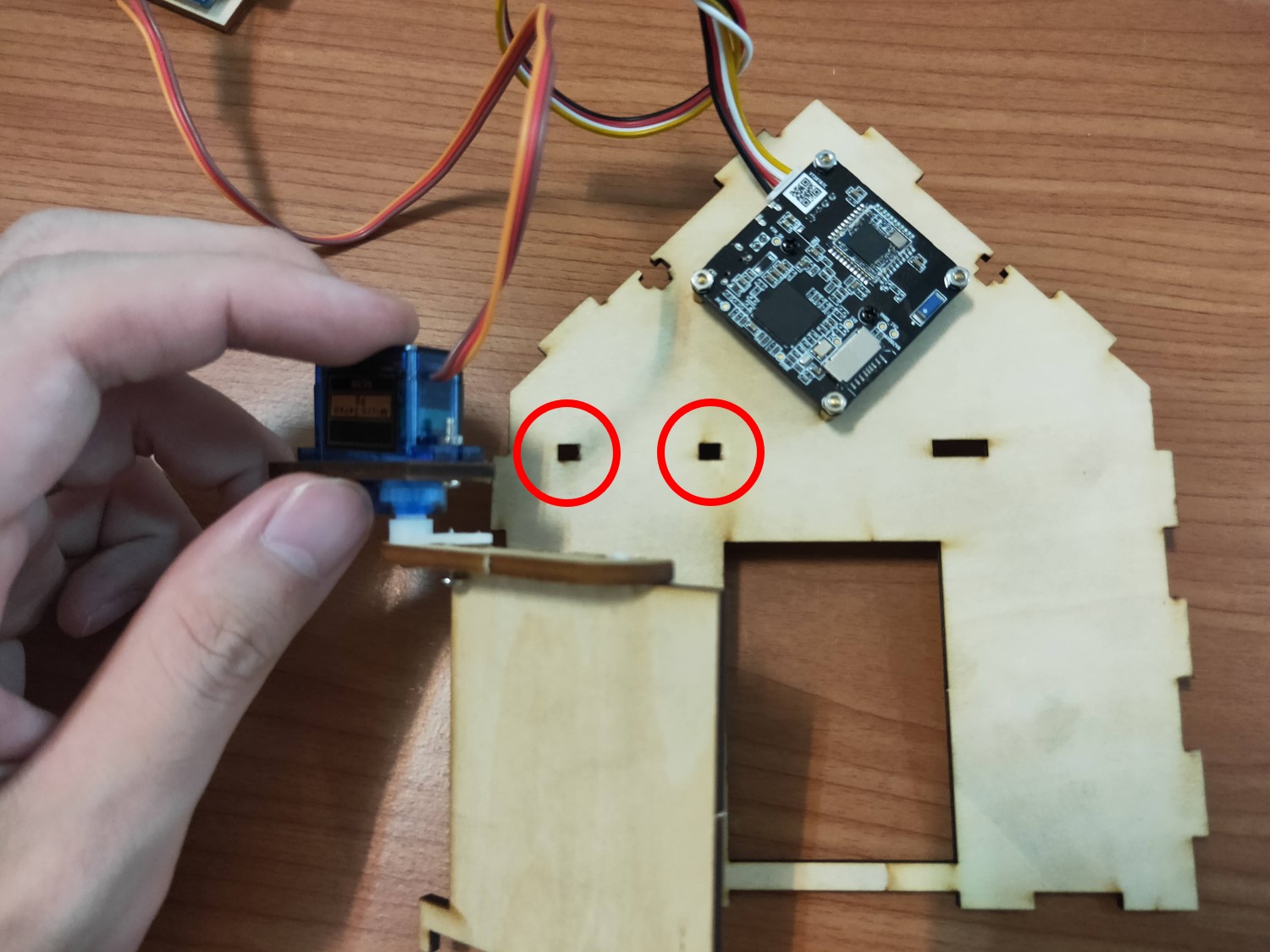
7-2. 用白膠或保麗龍膠將它們黏接在一起。
8. 組裝外殼
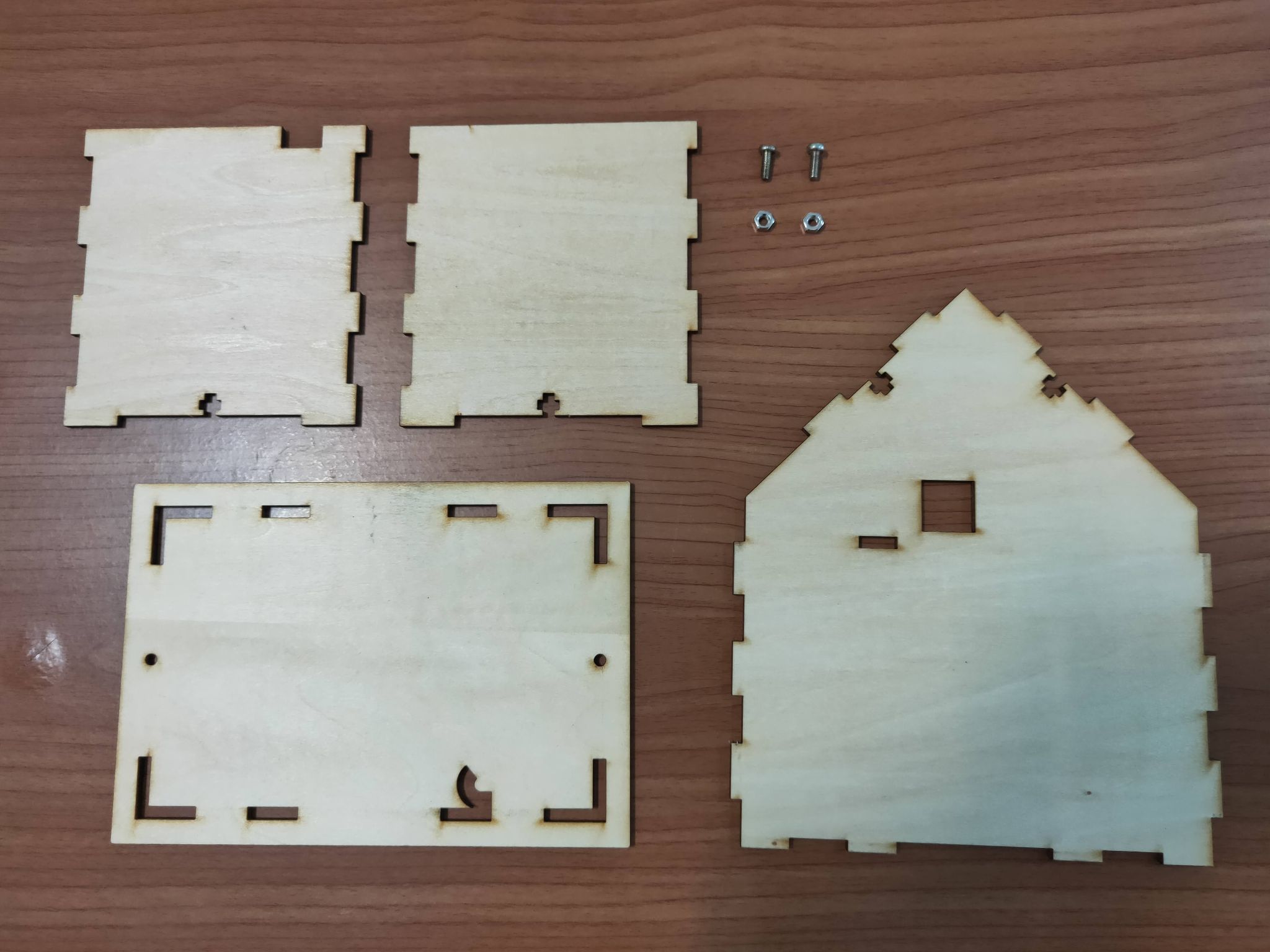
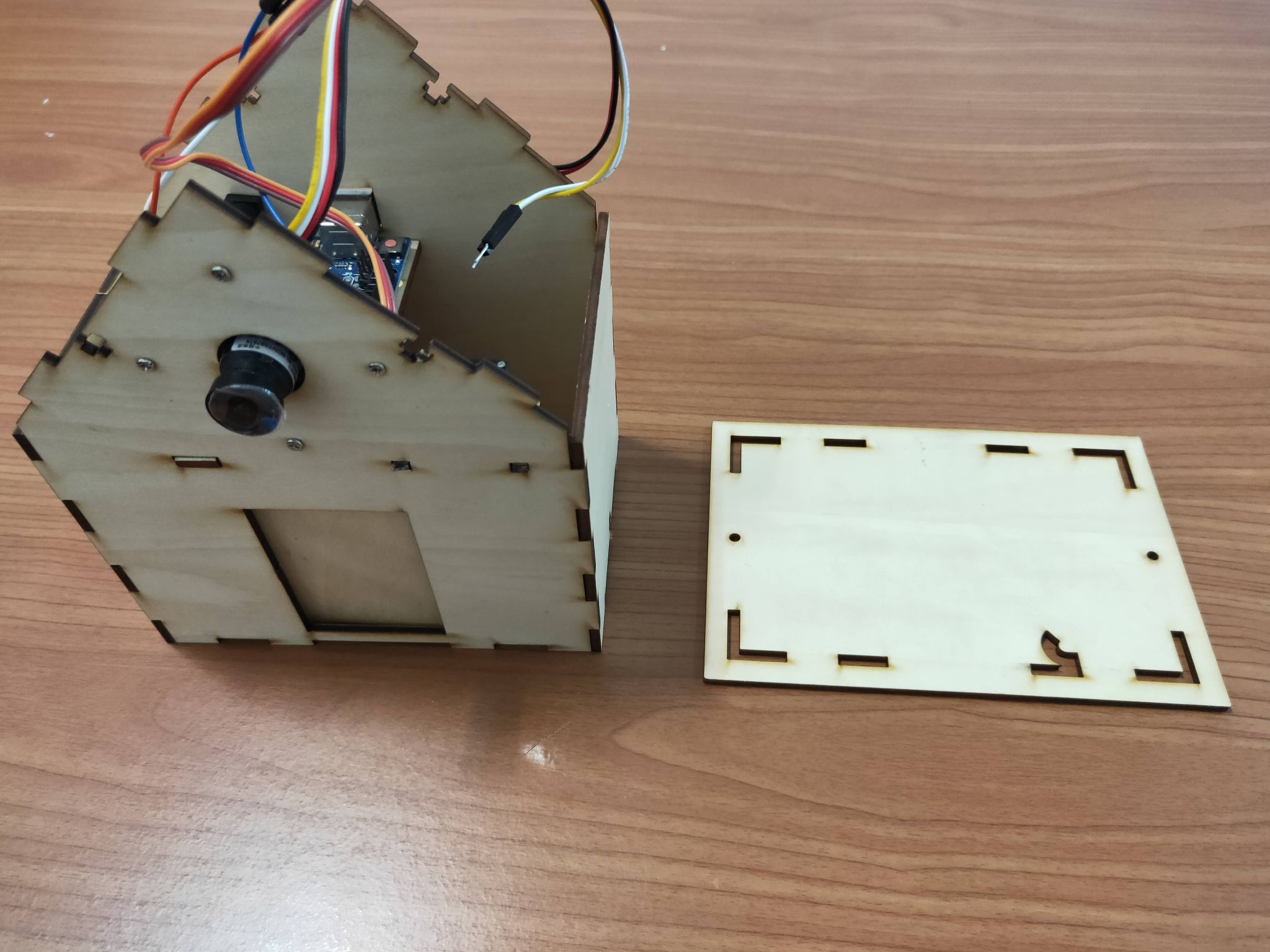
8-1. 準備如下圖所示的木板,兩個M3x8mm螺絲與兩個M3螺帽。
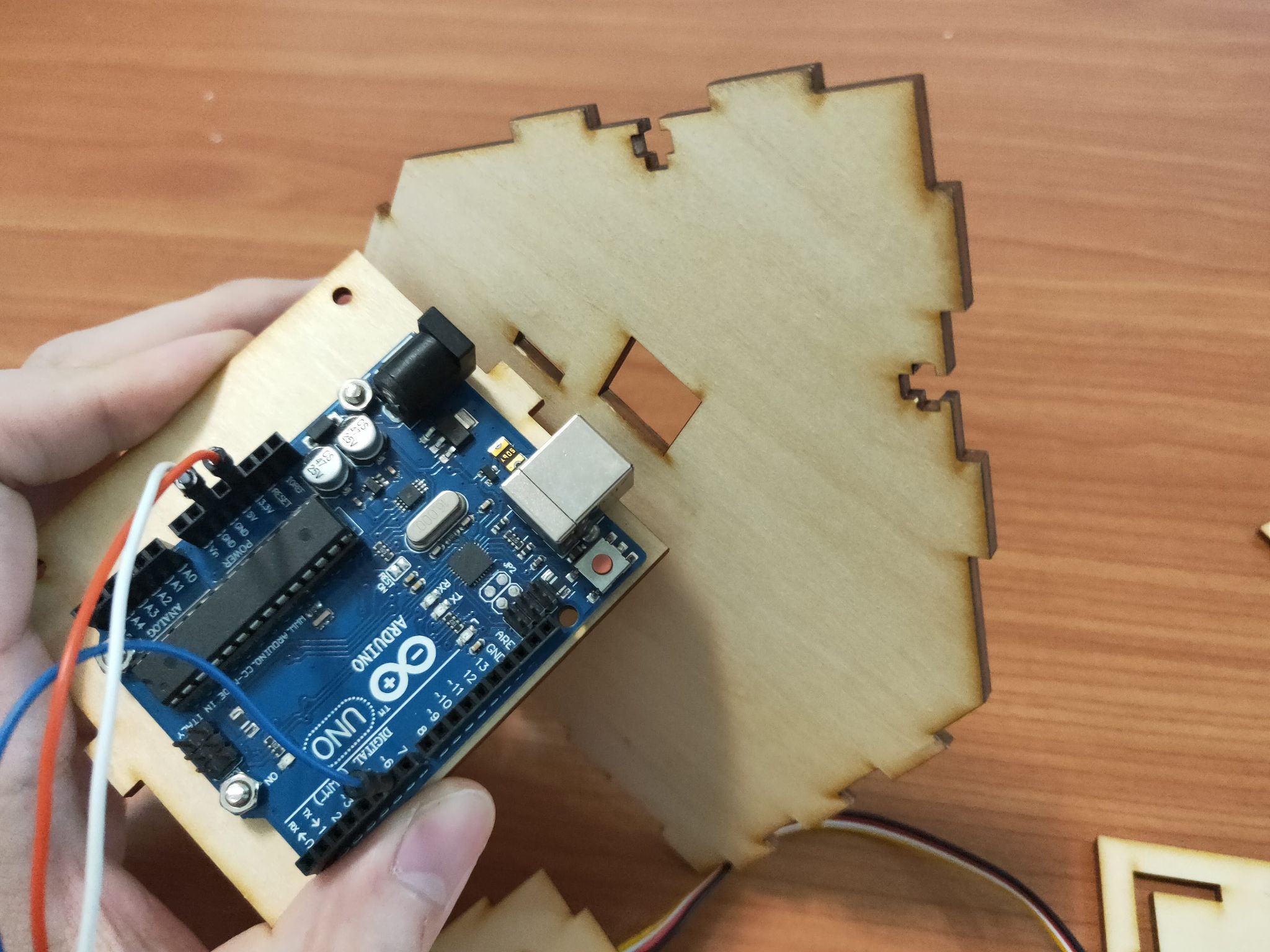
8-2. 將裝有Arduino UNO的木板如下圖對準房屋後側木板孔洞並安裝上去。
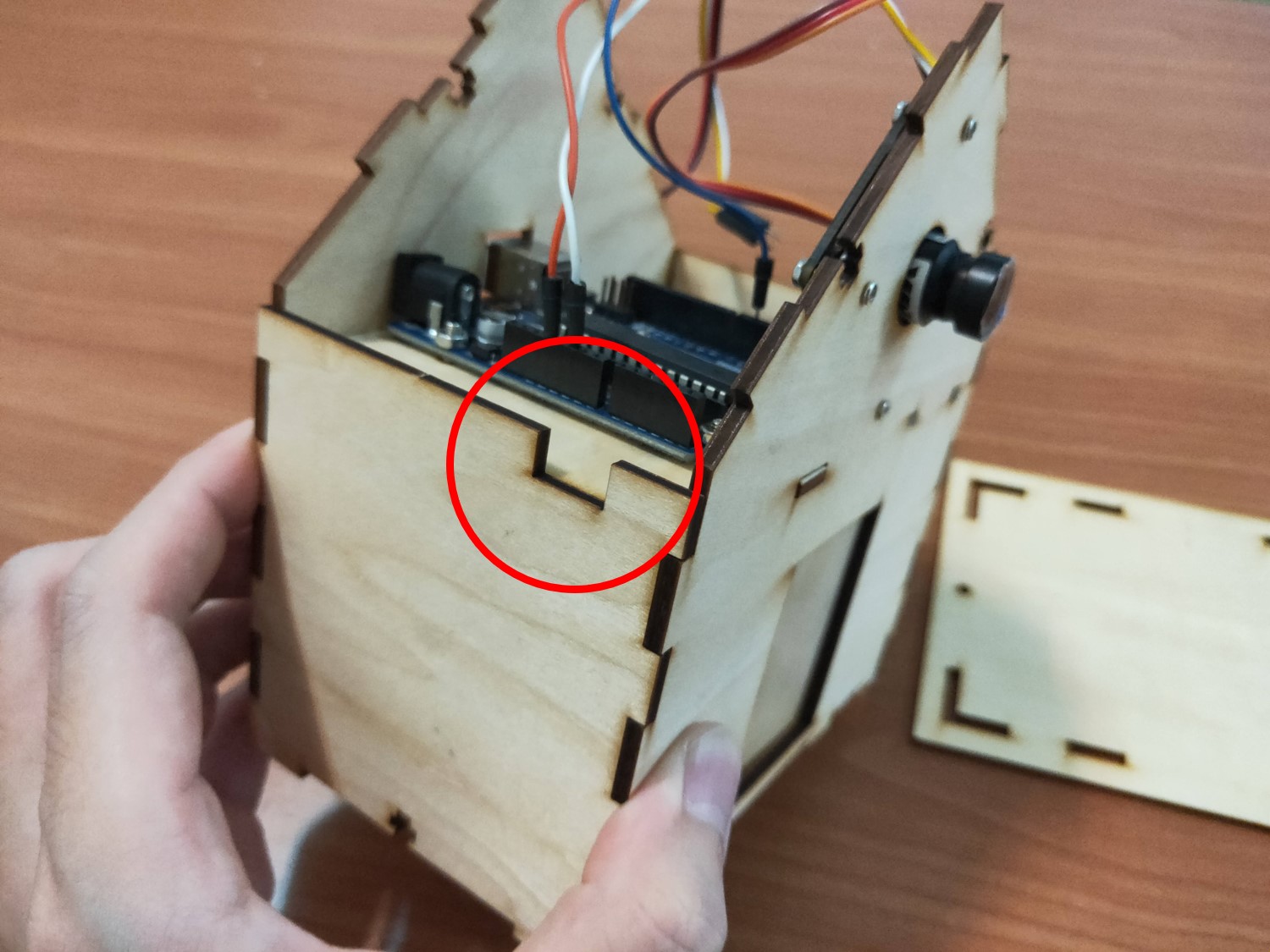
8-3. 接著將四周木板依照接合處組裝起來,注意其中一塊邊上有缺口的側板,其位子需在下圖標示方向。
8-4. 組裝完畢後如下圖,可加上白膠或保麗龍膠固定。
8-5. 依照下圖將房子蓋在底板上,注意缺口位子。

8-6. 裝好後注意房子內部,門的凸出機構需卡在洞內,如下圖所示。

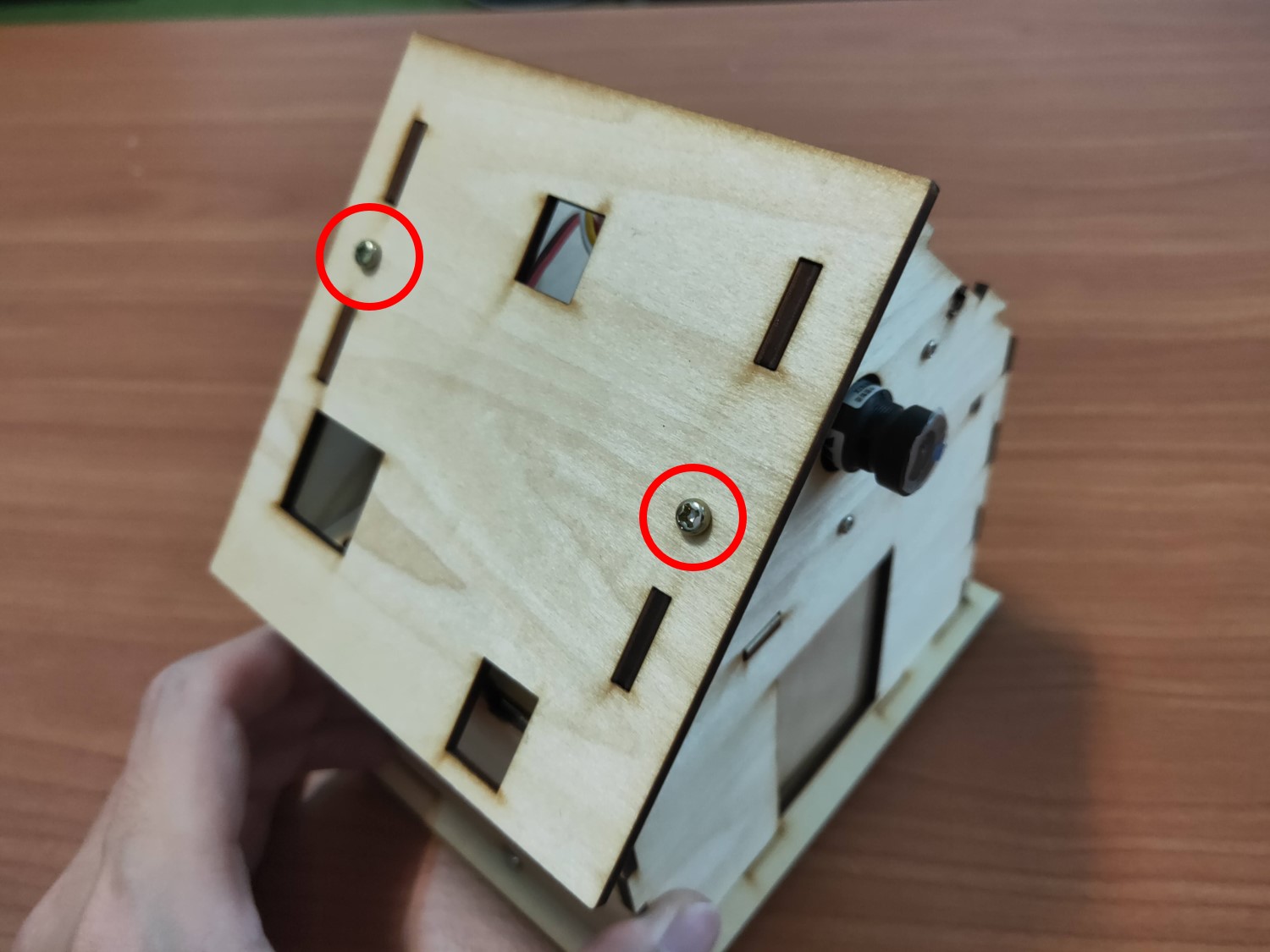
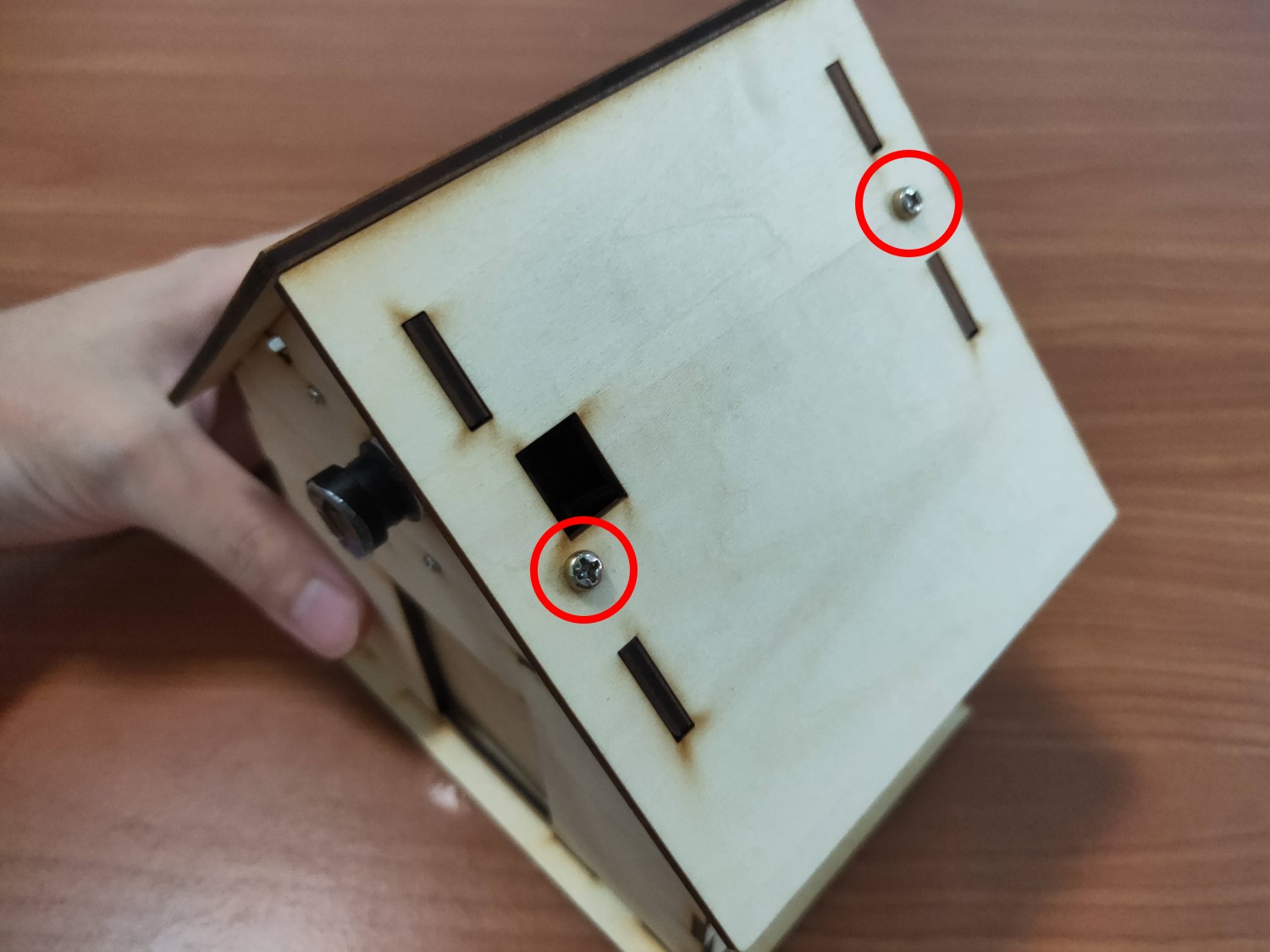
8-7. 接著用兩個M3x8mm螺絲與兩個M3螺帽固定房子與底板。

9. 連接Pixetto
9-1. 如下圖與表所示連接Pixetto。
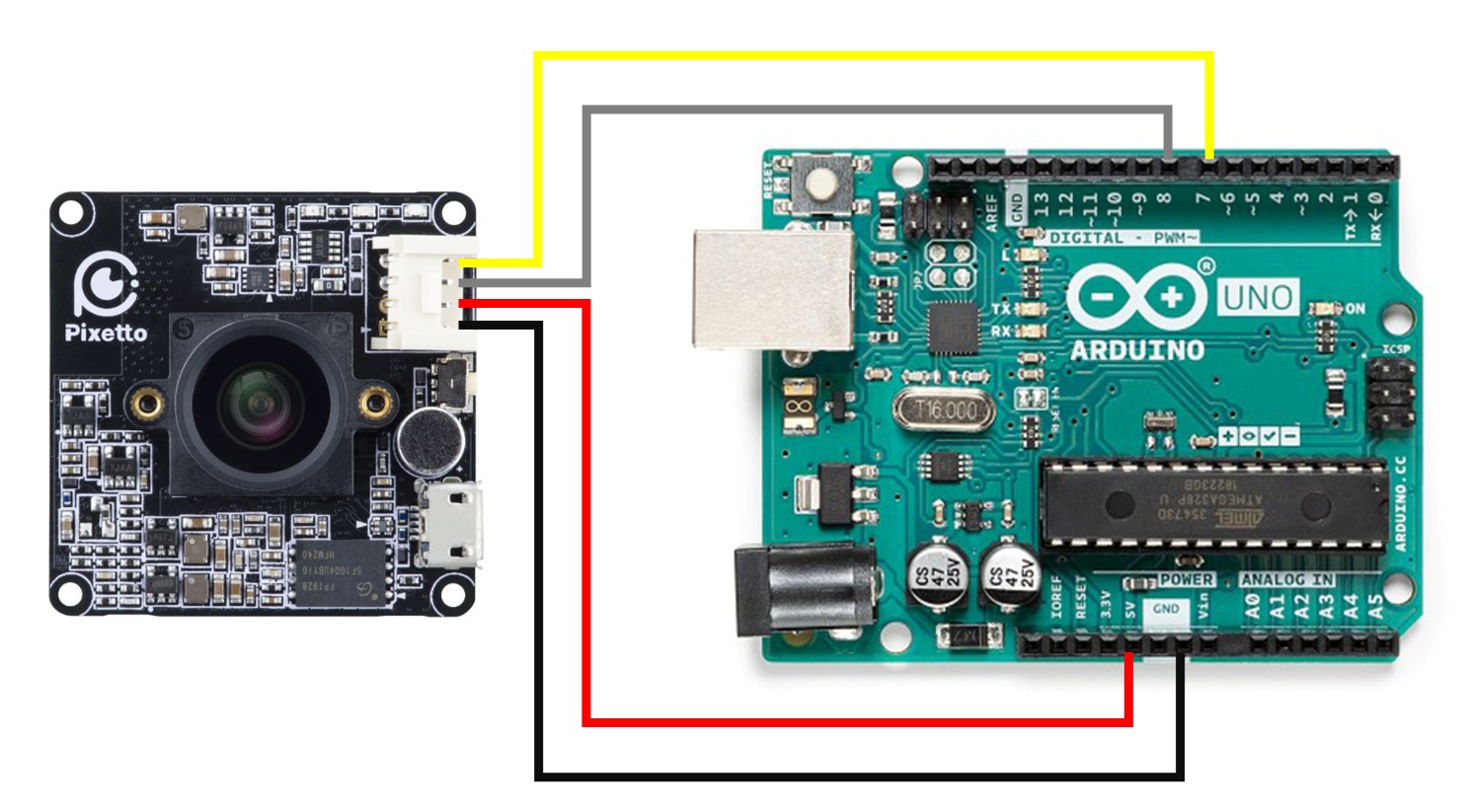
| Arduino UNO | Pixetto |
| D7 | R(黃色) |
| D8 | T(白色) |
| 5V | V(紅色) |
| GND | G(黑色) |
10. 組裝屋頂
10-1. 如下圖準備剩餘木板與四個M3x8mm螺絲與四個M3螺帽。

10-2. 將孔洞較多的木板如下圖所示方向,用M3x8mm螺絲與M3螺帽固定。
10-3. 另一片如下圖所示方向,請注意孔洞位子,同樣使用M3x8mm螺絲與M3螺帽固定。
10-4. 完成。

四、設定Pixetto
首先我們需要設定Pixetto執行模板偵測的功能,再由Arduino UNO接收偵測結果來控制伺服馬達。
1. 將Micro USB線透過屋頂側邊的孔洞連接到Pixetto上,另一端連接至電腦。

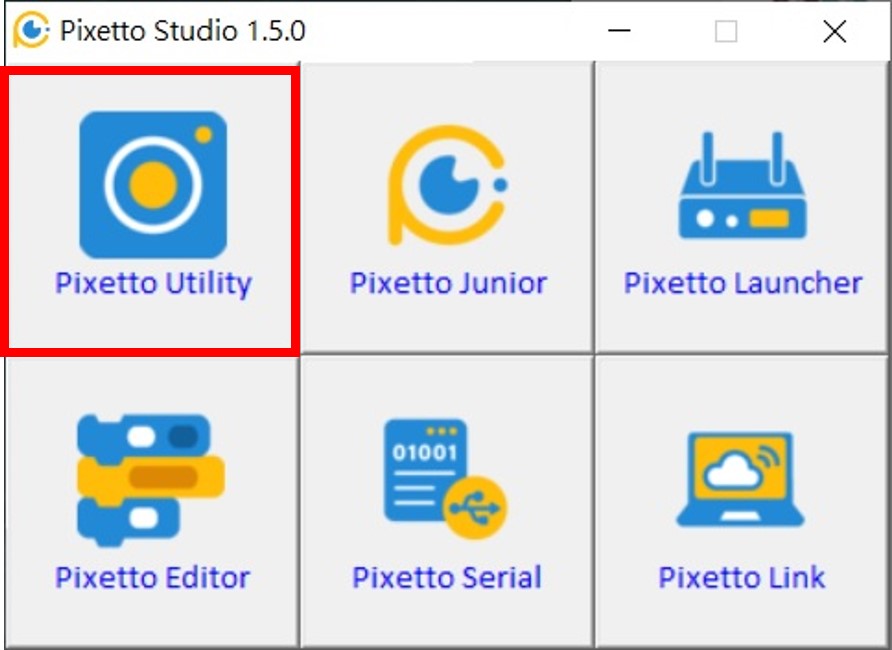
2. 打開軟體Pixetto Studio,並點選「Pixetto Utility」選項。
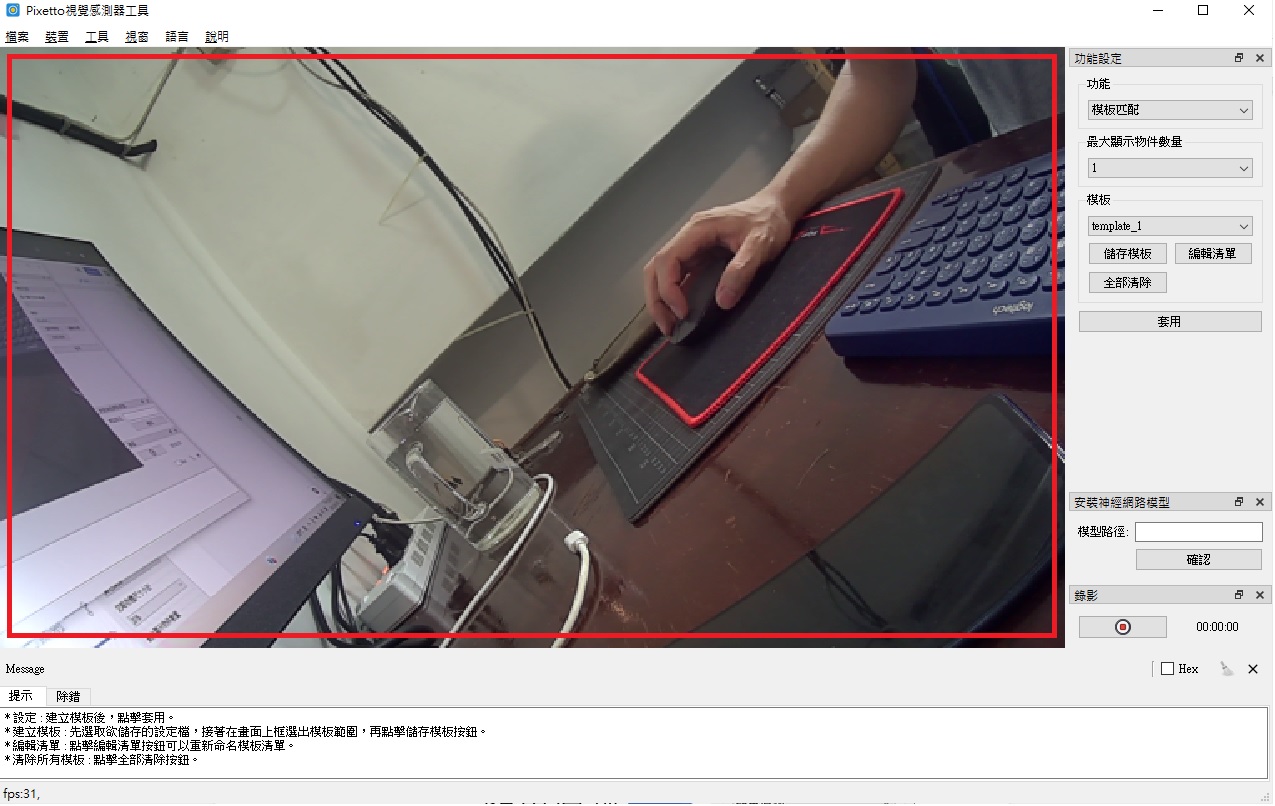
3. 等待Pixetto初始化完成後,即可在畫面中看到Pixetto拍攝的畫面。
4. 接著準備兩張不同人臉的圖片,作為待會讓Pixetto紀錄的圖片。
5. 依照下圖設定各個選項,首先於功能欄內選擇「模板匹配」。接著選擇我們要設定的模板,這個功能共可記錄三個模板,選擇「template_1」這個模板。選擇好模板後用滑鼠對著影像框選要辨識的人臉。最後按下「儲存模板」完成紀錄與儲存。
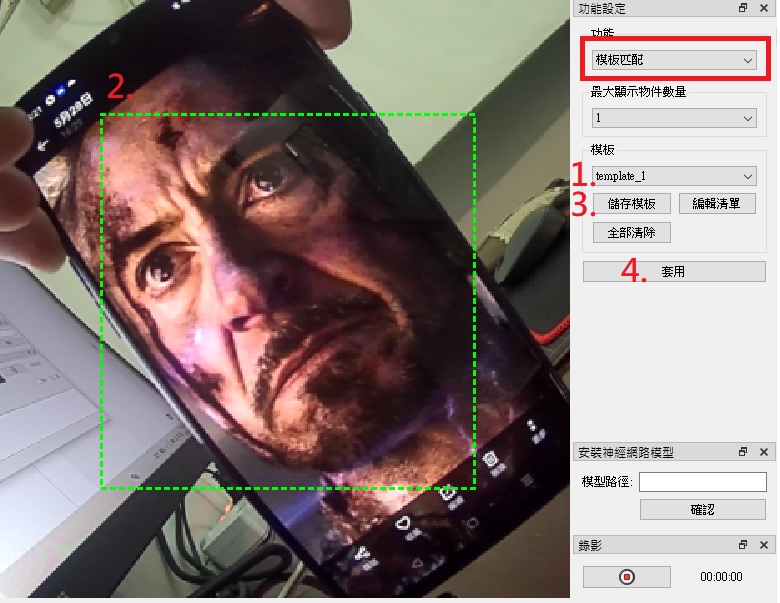
照著上述步驟選擇第二個模板「template_2」,同樣去框選第二張臉並按下「儲存模板」完成紀錄與儲存。在這階段的設定中,小編共設定了兩張不同臉的模板,用於辨識開關門的專案,您可以依照需求設定第三個模板。您也可透過「編輯清單」修改模板名稱,儲存完想要辨識的人臉後,按下「套用」將所有設定儲存在Pixetto,並關閉「Pixetto Utility」與移除USB傳輸線。