材料與工具準備
首先準備 MbitBot mini 自造包 – 幸運指針(不含micro:bit 與MbitBot mini)
因為幸運指針的自造包並沒有包含micro:bit 、MbitBot Mini 以及3.7V 鋰電池,所以還需要額外準備這些東西。

組裝工具的部份需要一支十字的螺絲起子與固定用的黏膠(樹酯白膠、保麗龍膠或快乾膠都可以,一般膠水可能比較黏不住)。

組裝教學
首先展開紙板並翻至背面,沒有任何圖案與字樣的那面稱為背面。

將邊邊有耳朵的地方像下圖沿著虛線向內凹折起來。

接著將盒子其餘摺處,也沿著虛線向內凹折起來。

拿出micro:bit 與MbitBot Mini ,並將micro:bit 插入MbitBot Mini 的插槽。
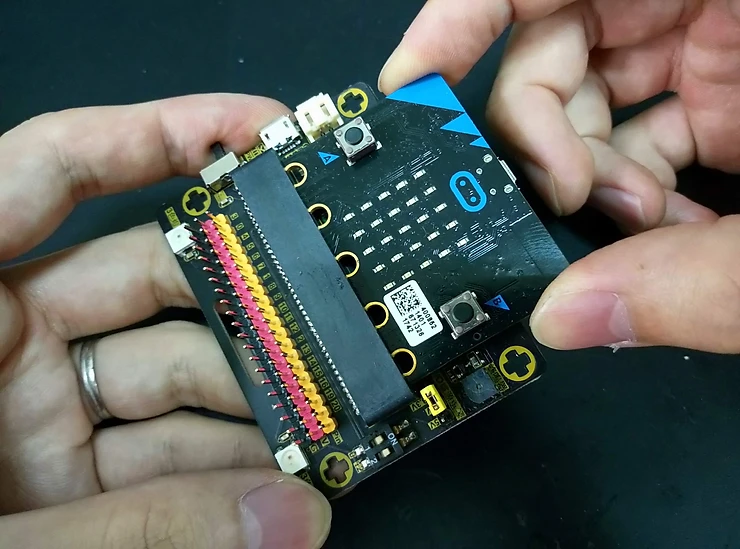
將micro:bit 與MbitBot Mini 放在底部如下圖的位子,注意其開關、電源接口與Micro USB充電口需對在左側孔洞的位子,而micro:bit 本身的Micro USB口需對上方孔洞。

拿出SG90 伺服馬達,將馬達的排線插在MbitBot Mini 上數字1的位子,排線的橘色線對應MbitBot Mini 的黃橘色位子,紅色對應紅色,褐色對應黑色。

而伺服馬達則從背面安裝在有雕圖案與文字的位子,可用黏膠固定馬達與紙板,切記馬達白色轉軸需位在圓形圖案的中間位子。

接著將電池接上電源插座。

將電池放在MbitBot Mini 上方,並將四周紙板向內合起來。

將凸板對其溝槽並插入固定。
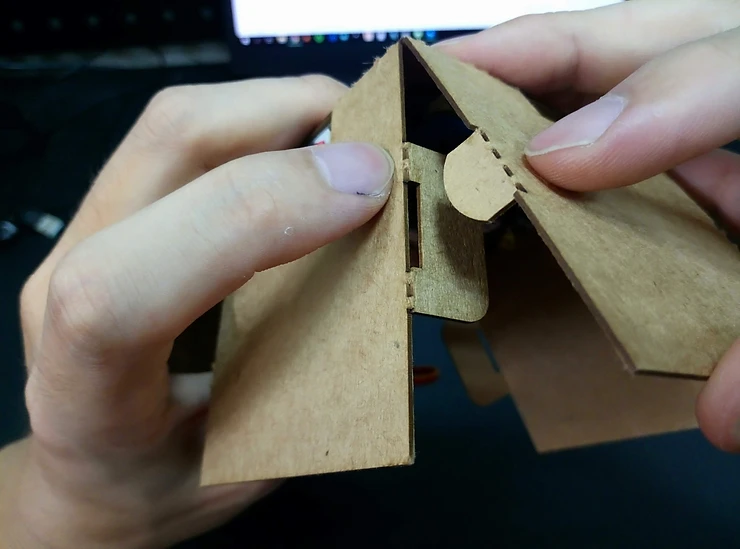
如下圖將各處結合起來。

拿出如下圖的白色舵片安裝在伺服馬達上,並拿出伺服馬達內附的小螺絲。

將手指造型紙板壓在白色舵片上,並用螺絲將紙板與舵片固定在伺服馬達上。

這樣組裝就大功告成了喔!

程式撰寫
程式流程是這樣的~我們希望打開電源後,透過搖動盒子觸發360度的伺服馬達轉動,並在時間上動手腳,讓馬達轉動時間變為隨機,時間一到即停止,製造出隨機抽籤的感覺。
幸運指針是使用360 度的伺服馬達,使用上與一般180 度的伺服馬達並沒有不同,唯一不一樣的是輸入的角度對於控制馬達上不太一樣,如下圖所示:當輸入90 度時,360 度的伺服馬達會停止轉動,若要讓馬達旋轉起來只要輸入大於90 度或小於90 度的數字即可,輸入數字距離90 越大或越小,則轉動速度越快。

當輸入180 度時,馬達會朝某個方向以100% 的速度轉動,若要調整轉速,範圍為90 度至180 度。當輸入0 度時,馬達會朝與180 度相反的方向以100% 的速度轉動,調速範圍為90 度至0 度。
知道馬達如何轉動以及停止後,我們就可以開始寫程式囉~一如往常請打開micro:bit 撰寫程式的網頁 MakeCode。

接著點選積木列中的「輸入」,並拖拉出「當姿勢[晃動]發生」。
![選擇「輸入」,拖拉出「當姿勢[晃動]發生」程式積木](https://static.wixstatic.com/media/0abcbf_df815a789c2748e79f7f67b74061d6bd~mv2.png/v1/fill/w_740,h_323,al_c,q_90,usm_0.66_1.00_0.01/0abcbf_df815a789c2748e79f7f67b74061d6bd~mv2.webp)
點選積木列中的「引腳」,並拖拉出「伺服寫入 腳位[P0]至(100)」。
![點選「引腳」,並拖拉出「伺服寫入 腳位[P0]至(100)」程式積木](https://static.wixstatic.com/media/0abcbf_bcc8662e318249ee805c041226a3131a~mv2.png/v1/fill/w_740,h_323,al_c,q_90,usm_0.66_1.00_0.01/0abcbf_bcc8662e318249ee805c041226a3131a~mv2.webp)
將程式積木放至「當姿勢[晃動]發生」內,並更改腳位為P1。
![將程式積木放至「當姿勢[晃動]發生」內,並更改腳位為P1](https://static.wixstatic.com/media/0abcbf_74b3729b6614437cba59000255d4ee46~mv2.png/v1/fill/w_740,h_322,al_c,q_90,usm_0.66_1.00_0.01/0abcbf_74b3729b6614437cba59000255d4ee46~mv2.webp)
接著要加入轉動時間,點選「基本」,接著拖拉出「暫停(100)毫秒」。

如下圖放至馬達程式下方。

如我們所需求的,為了增加隨機感,需要在時間上動手腳,我們會將時間分為固定時間與隨機轉動時間,將這兩個時間加起來即是我們馬達每次轉動的總時間。
自訂的固定時間 + 隨機產生時間 = 總轉動時間
點選積木列的「數學」,拖拉出「(0)+(0)」。

再點選積木列的「數學」,並拖拉出「隨機取數(0)到(10)」。

將「隨機取數(0)到(10)」拖進+號右方,並將隨機範圍設為0 到2000 ,並在+號左邊填入固定時間,在此設為3000,因為單位為毫秒,所以總時間的範圍落在3 秒至5 秒。

接著我們加入停止馬達轉動的程式積木,記得數值是填入90 喔,並加入暫停1 秒的程式積木。

撰寫完畢後插上Micro USB 線至micro:bit ,並下載程式到micro:bit 裡。
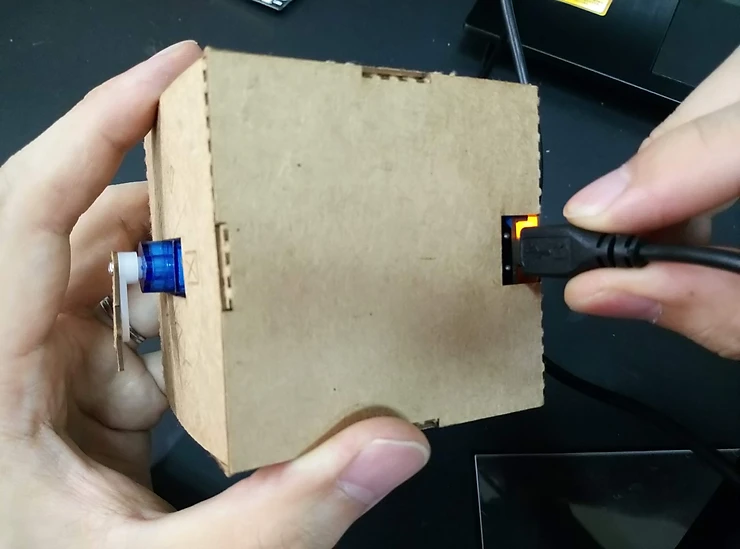
拔除Micro USB 線時,請確認micro:bit 沒有被拔出MbitBot Mini,若有脫落可以在電源尚未開啟時用手指略推固定。

一切確認完後打開電源。

搖動一下~確認您的運勢吧!