一、介紹
威盛Pixetto為高畫質視覺感測器,能夠實現物體、形狀、顏色、人臉及手寫辨識等功能。完整的機器學習平台,不但有適合學生的Scratch程式編輯環境,更可讓使用者自由調整並訓練自己的AI模型。不論您是初學者或進階創作者,都能方便的使用AI解決方案。
本篇教學將帶大家使用Pixetto進行模板偵測,透過辨識到的人臉,轉而控制伺服馬達來帶動門的機構,達成檢測到正確人臉就開門的專案。
二、軟體下載及安裝
1. 點選下方連結,開啟VIA Pixetto文件&軟體下載頁面。
2. 至軟體下載位置,點選威盛Pixetto軟體套件,下載軟體並安裝。

3. 安裝完畢後開啟軟體,看到下列視窗即完成。

三、組裝教學
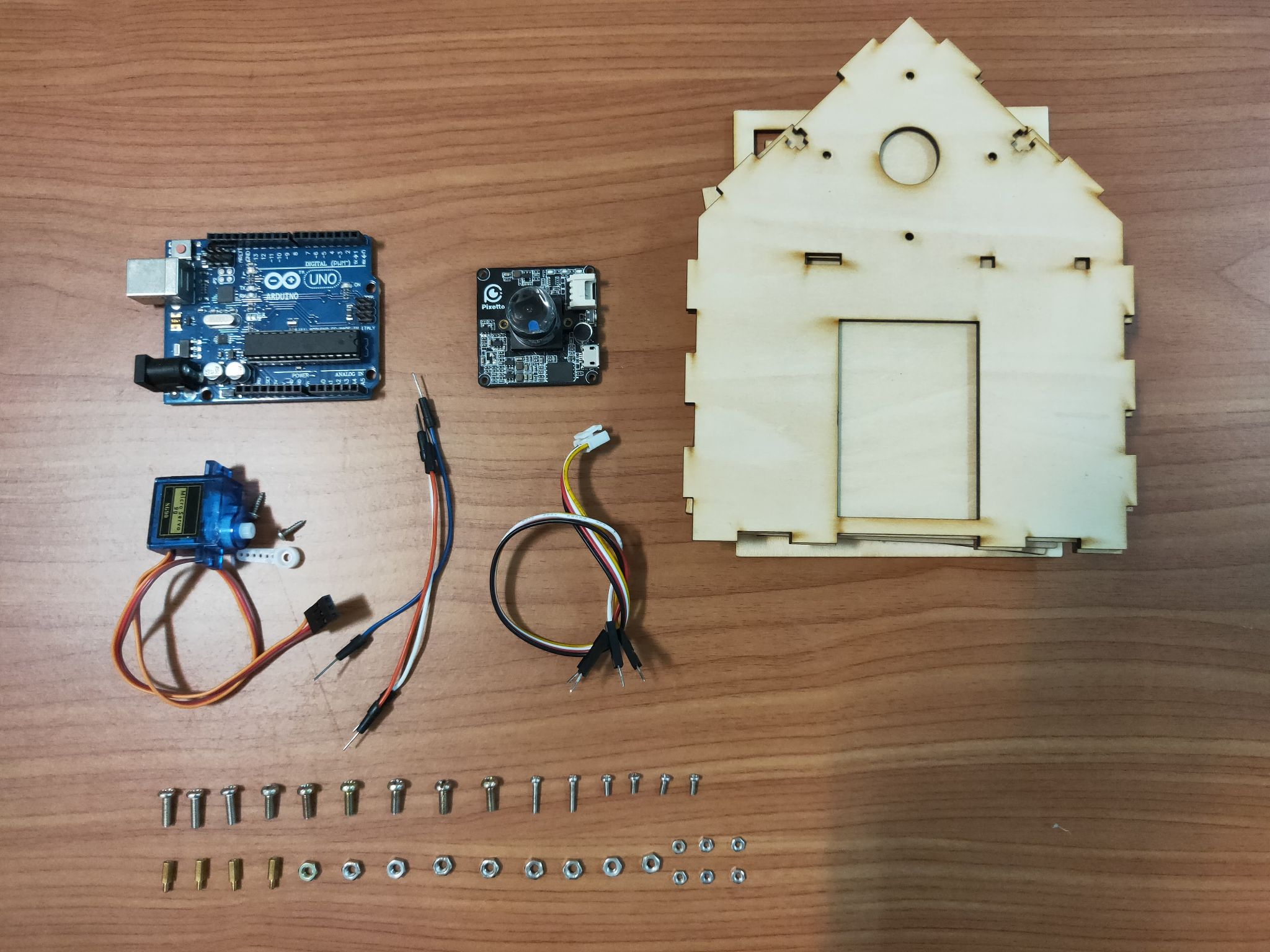
1. 材料零件清單
組裝過程中需要的零件、模組與連接線如下表所示:
| 名稱 | 數量 | 名稱 | 數量 |
| Arduino UNO | 1個 | 威盛Pixetto | 1個 |
| SG90伺服馬達(180度) | 1個 | 木頭外殼 | 1組 |
| 1P杜邦線(公 – 公) | 3條 | Grove母座 to 4P公端杜邦線 | 1條 |
| M3x10mm螺絲 | 4個 | M3x8mm螺絲 | 6個 |
| M2x10mm螺絲 | 2個 | M2x5mm螺絲 | 4個 |
| M3螺帽 | 10個 | M2螺帽 | 6個 |
| M2*6mm銅柱 | 4個 |
組裝過程中除了要準備螺絲起子,還需要保麗龍膠或是白膠來連接木板。
2. 安裝Arduino UNO
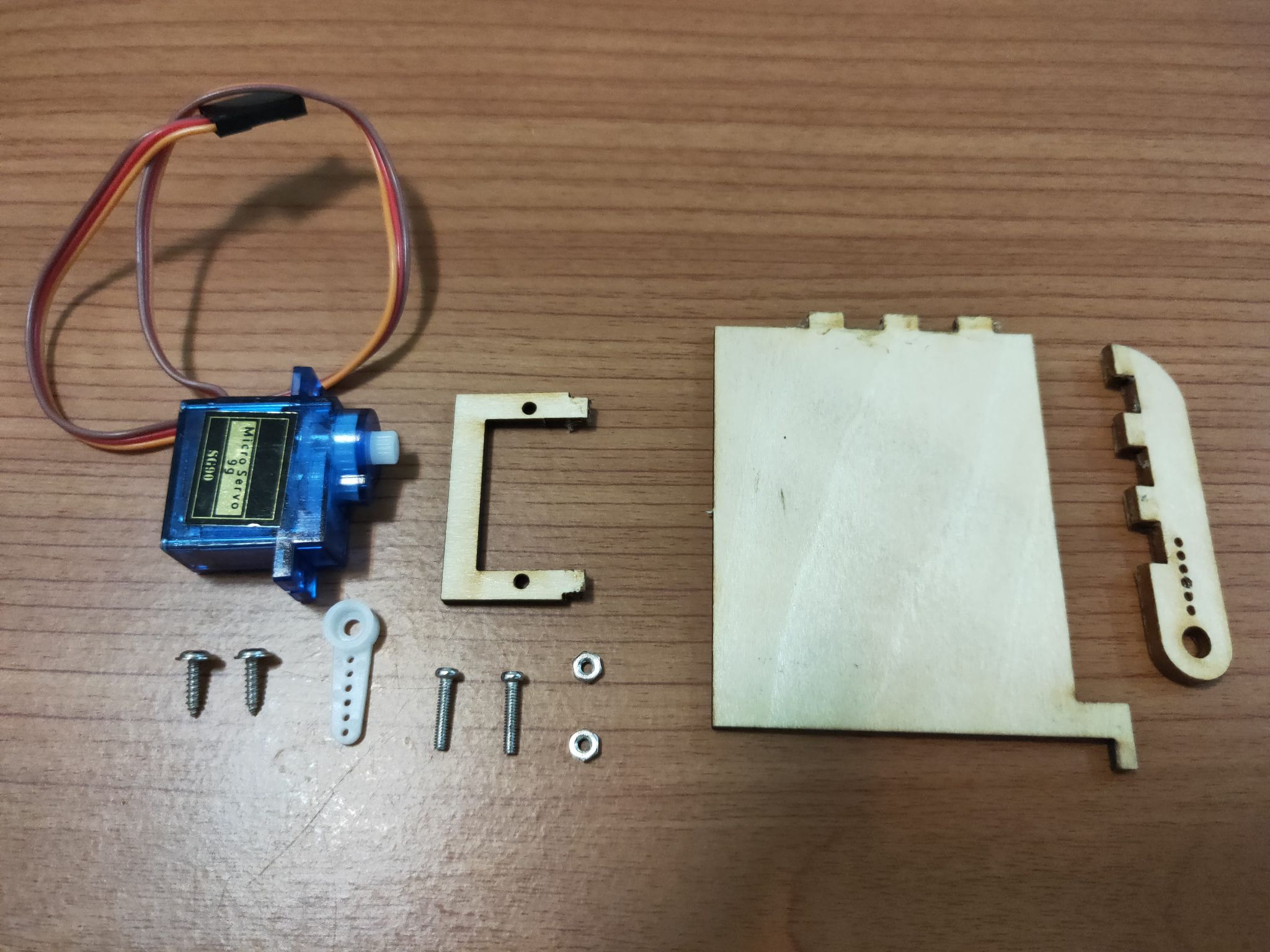
2-1. 準備如下圖所示之木板、Arduino UNO、M3x10mm螺絲3個與M3螺帽3個。
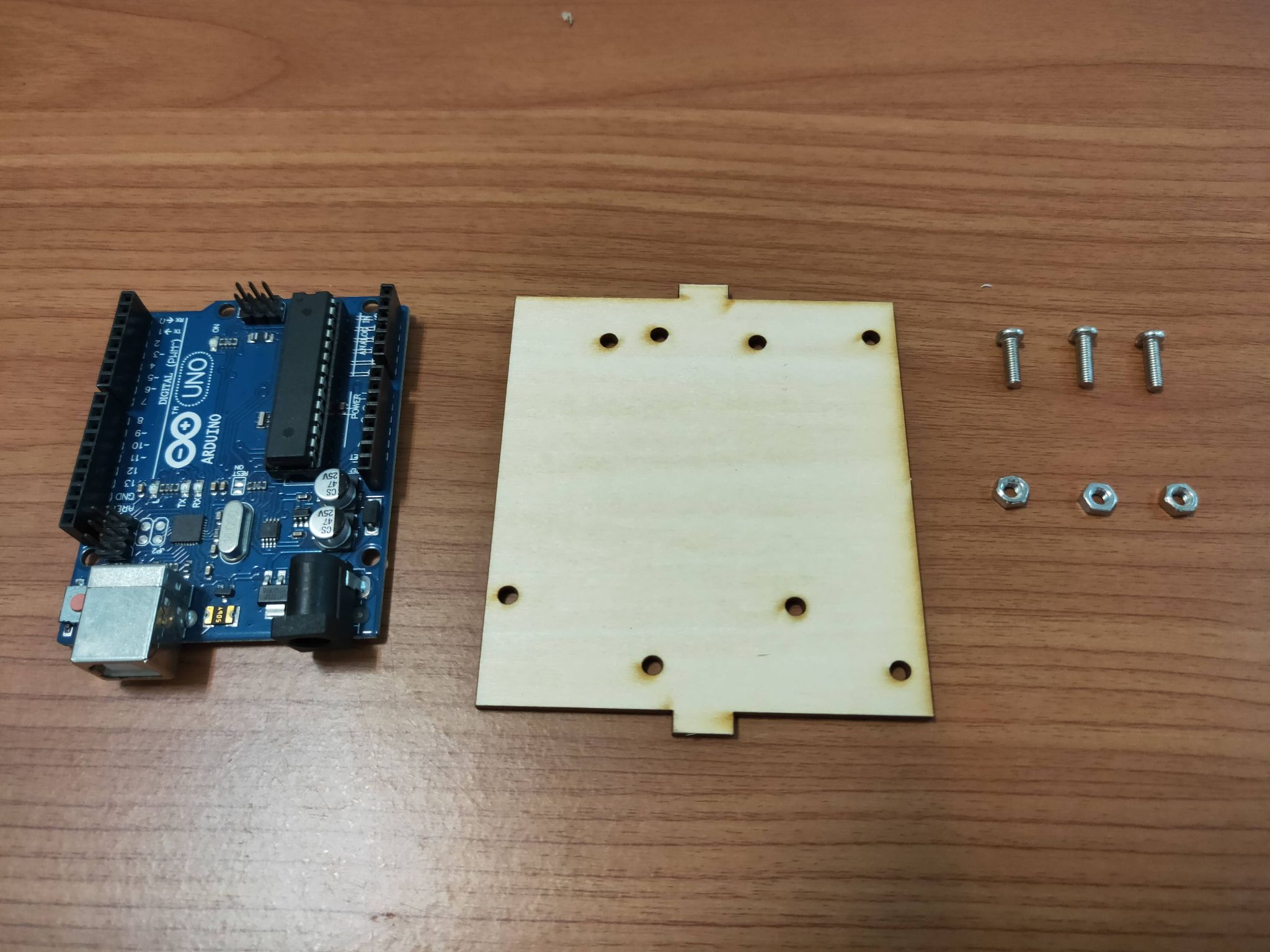
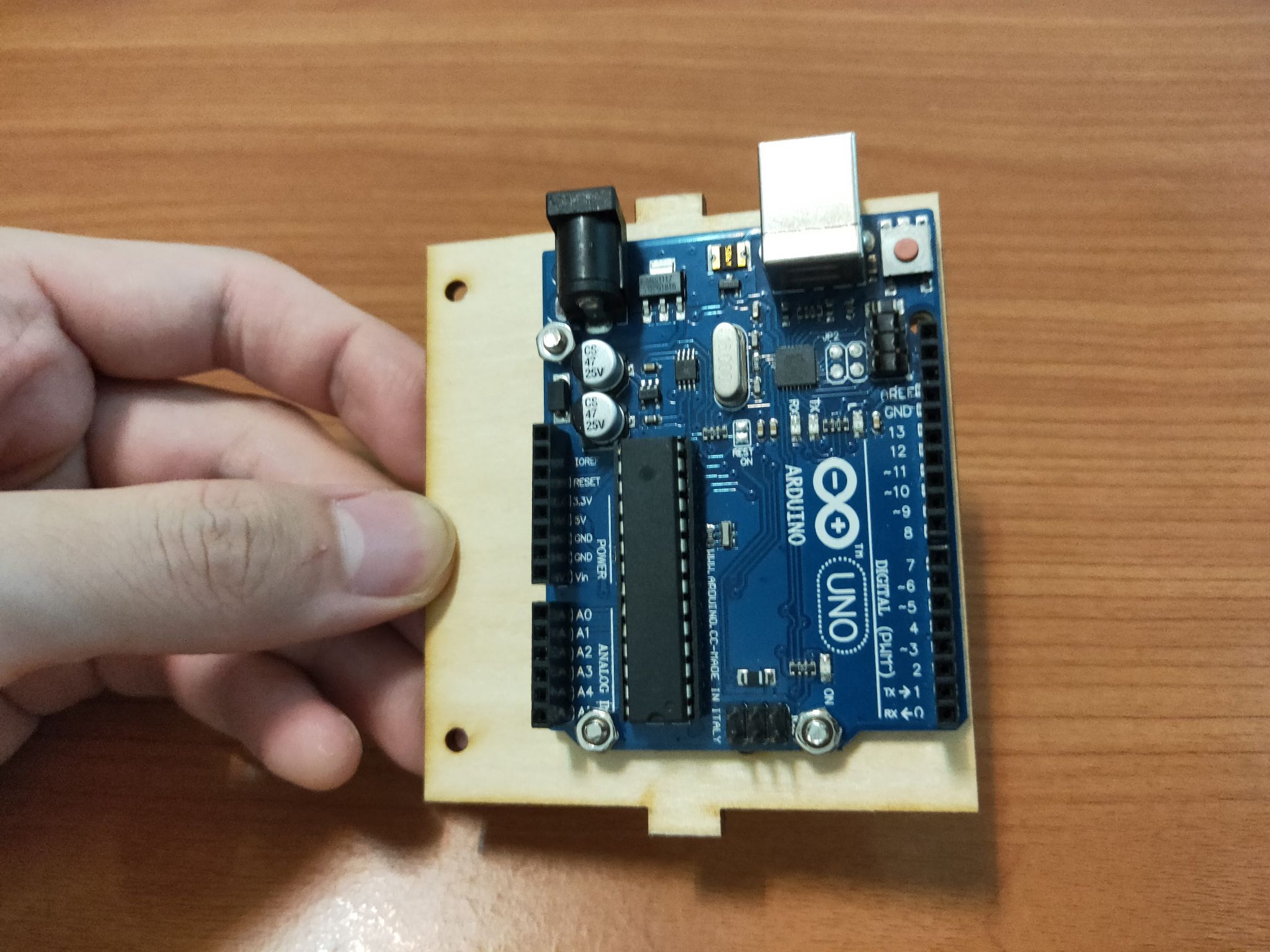
2-2. 將Arduino UNO對齊下圖所示的孔洞,並用螺絲螺帽固定。

3. 安裝伺服馬達與開關門機構
3-1. 準備如下圖所示之木板、伺服馬達與隨附的舵片螺絲、M2x10mm螺絲2個、M2螺帽2個。
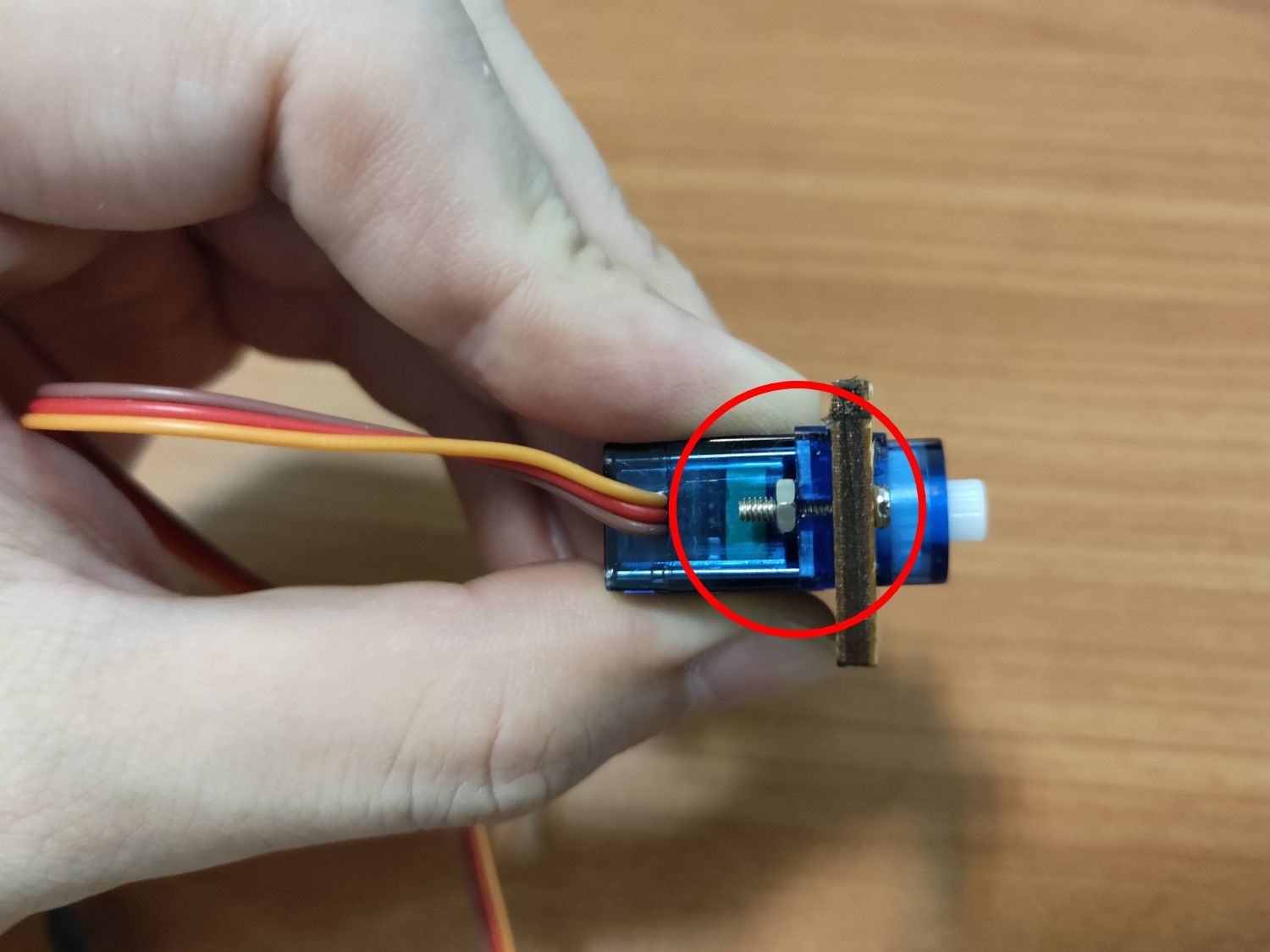
3-2. 將ㄈ型木片如下圖卡在伺服馬達上,並用兩個M2x10mm螺絲穿過伺服馬達與木板的圓孔。
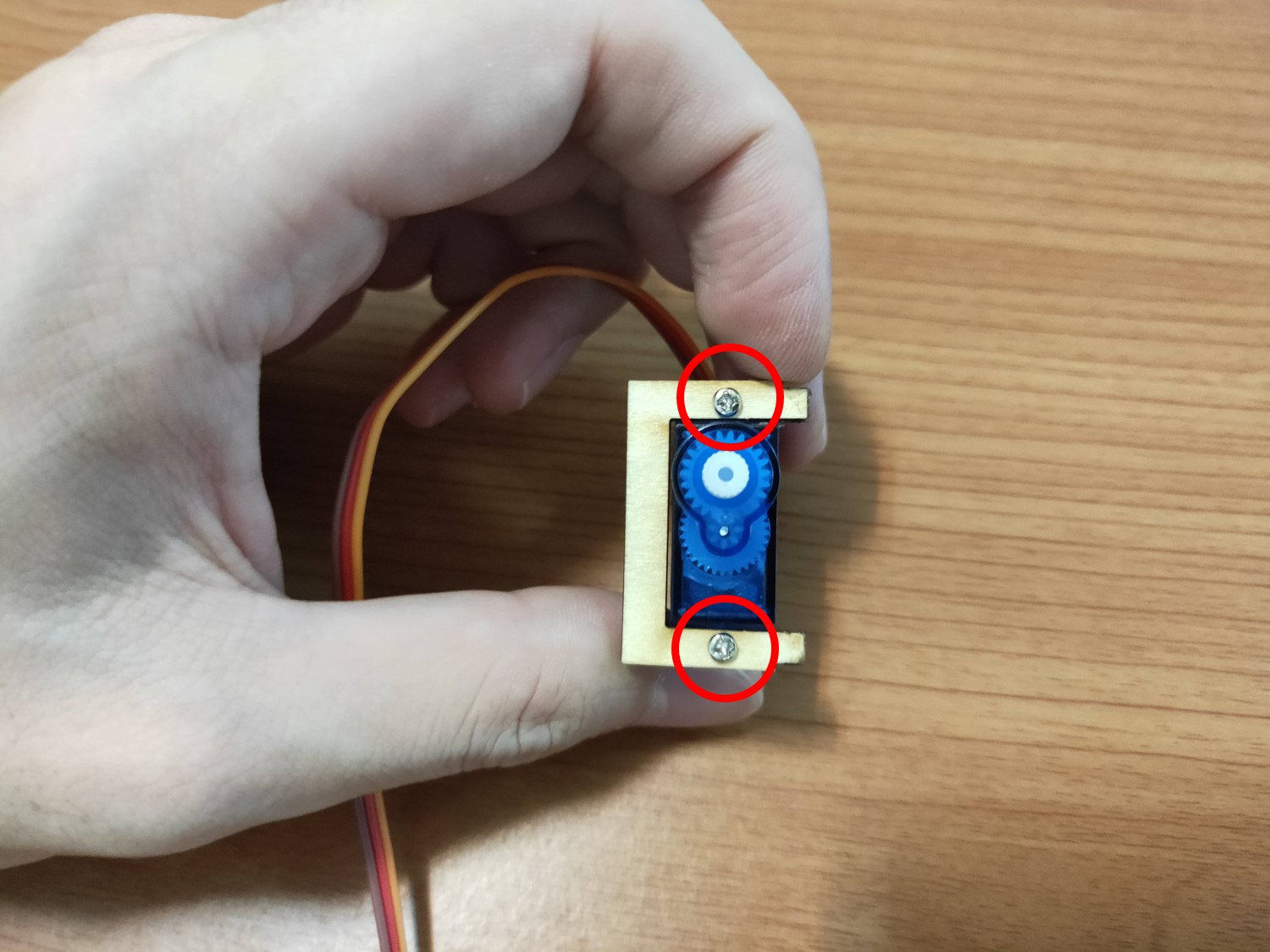
3-3. 用M2螺帽將其固定、兩個螺絲都是。
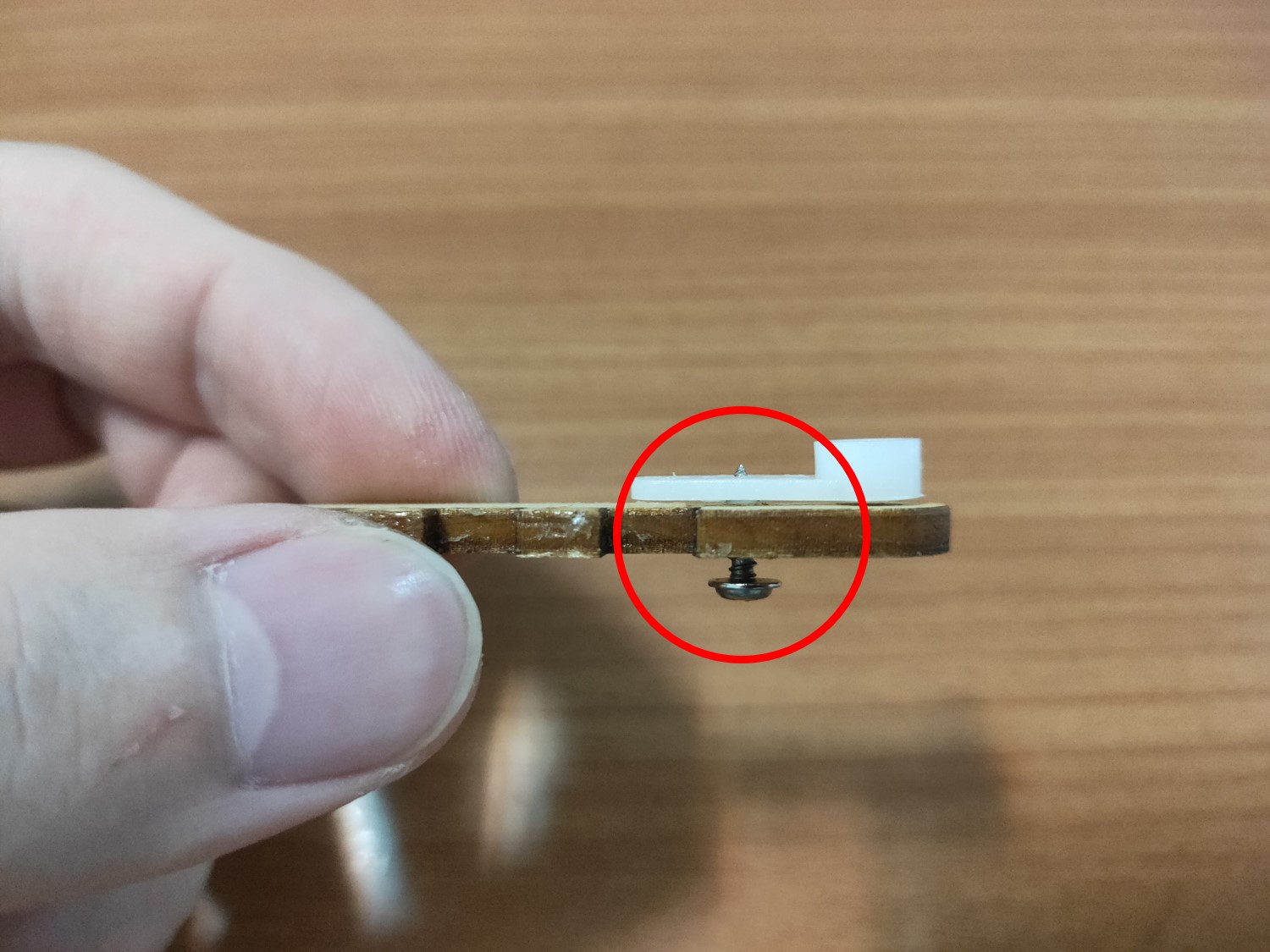
3-4. 接著將舵片與其中一塊木片依照下圖方向合在一起。

3-5. 接著取出伺服馬達隨附的攻牙螺絲,依照下圖所示由木片那側,用攻牙螺絲將木片與舵片鎖在一起固定。攻牙螺絲稍微穿出舵片即可,不用鎖到底。
4. 伺服馬達接線並透過程式校正
4-1. 準備如下三條1P杜邦線(公 – 公),與Arduino UNO。
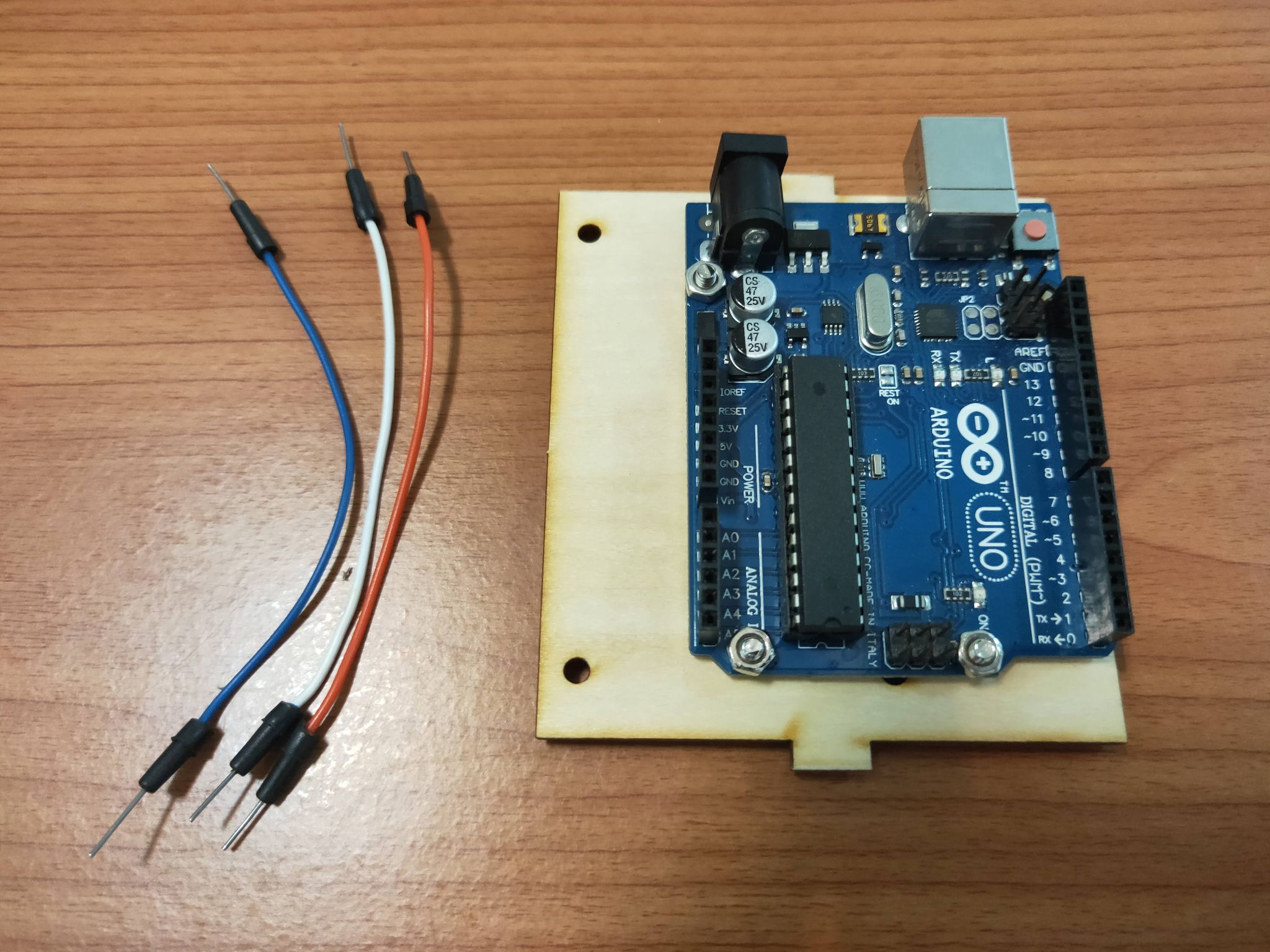
4-2. 依照下圖、表,將伺服馬達連接到Arduino UNO。

| Arduino UNO | 伺服馬達 |
| D6 | S(橘色) |
| 3.3V | V(紅色) |
| GND | G(褐色) |
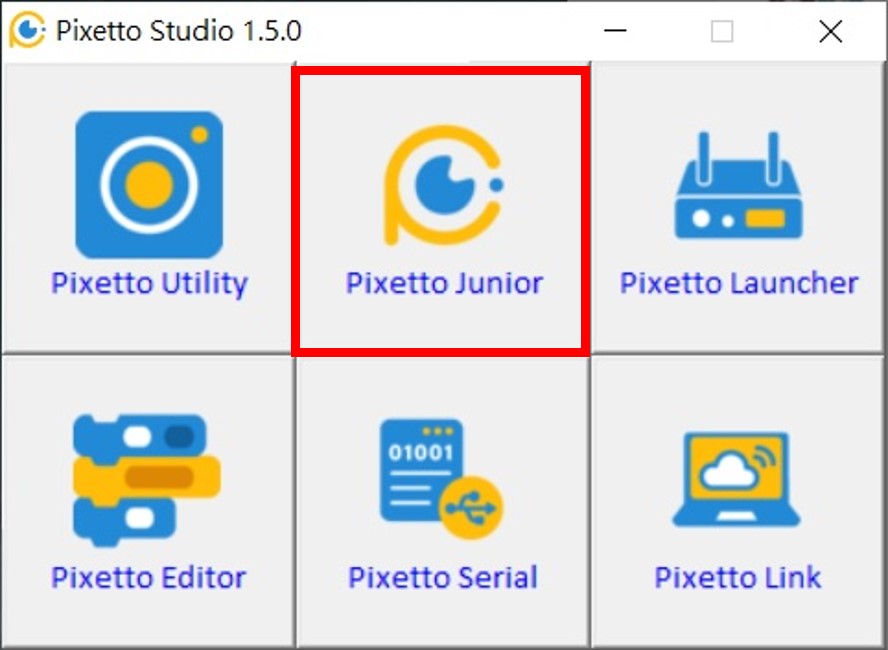
4-3. 拿取USB連接線將Arduino UNO與電腦連接在一起,開啟軟體Pixetto Studio,並點選「Pixetto Junior」選項。
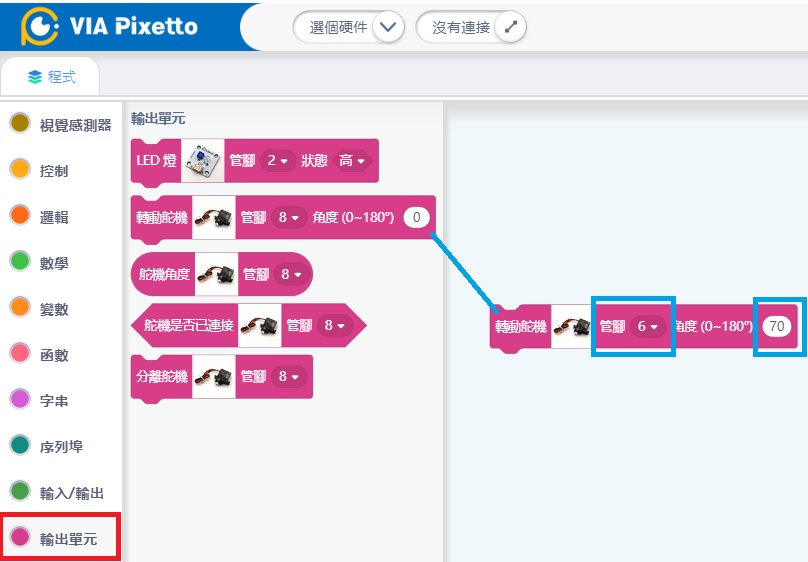
4-4. 從右側程式積木列表中點選「輸出單元」,並拖拉出「轉動舵機…」的程式,將管腳設定為「6」,角度設為「70」。
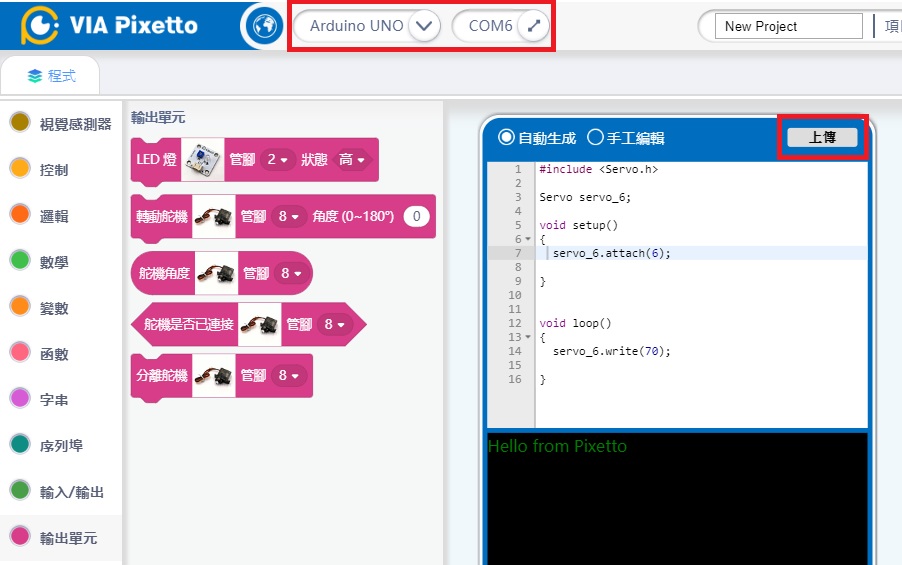
4-5. 於上方選擇我們使用的控制板Arduino UNO與連接到電腦的COM Port,接著按下上傳將程式上傳到Arduino UNO。上傳完畢後,伺服馬達會轉動至指定的70度。
5. 安裝舵片與門
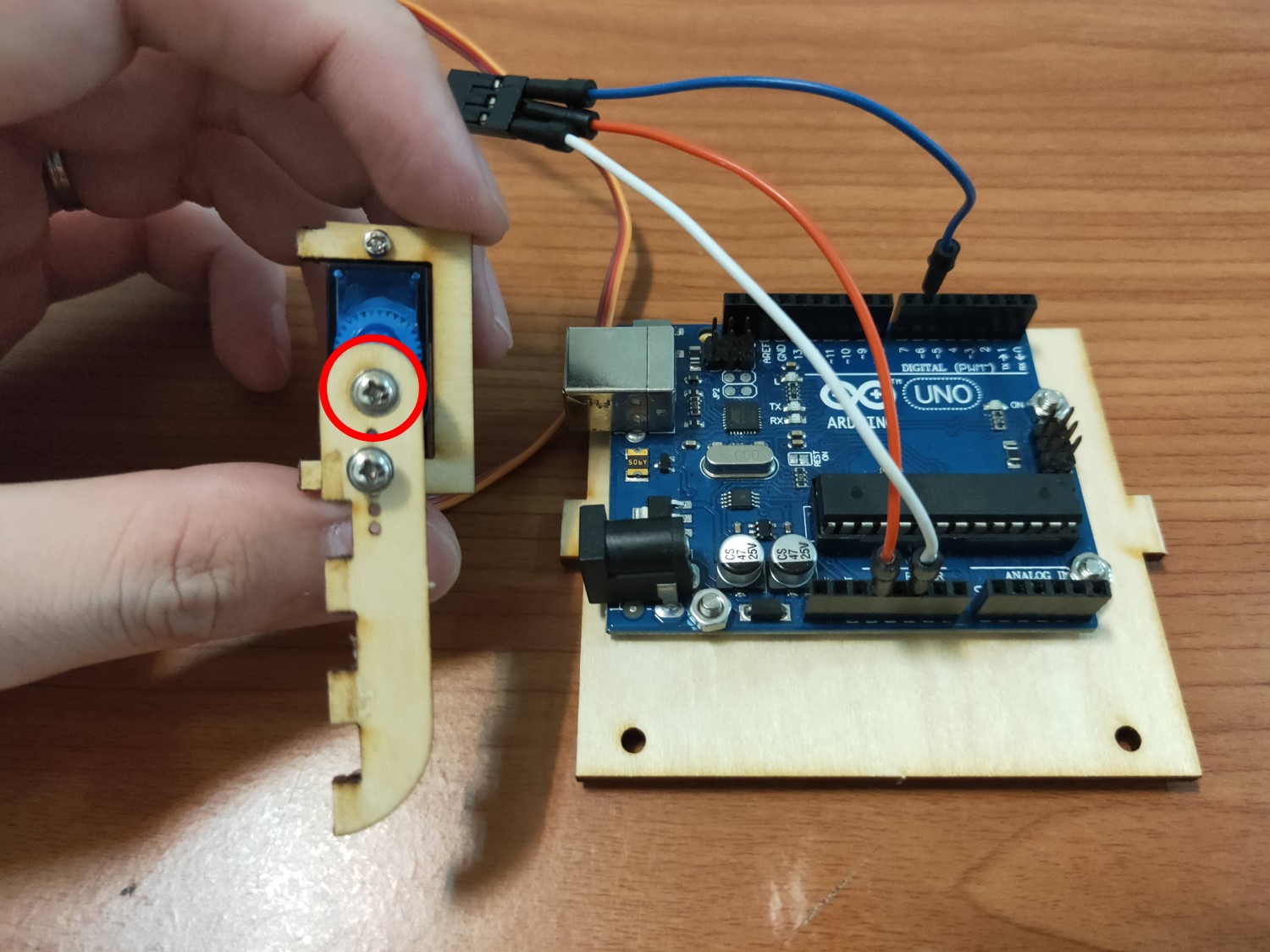
5-1. 通過程式指定好伺服馬達的角度後,即可拔除USB傳輸線,並將舵片小心地安裝在伺服馬達上,請注意不要轉動到伺服馬達,並用另一根攻牙螺絲依照下圖位子固定。
5-2. 接著拿出白膠或是保麗龍膠,如下圖將與舵片連接的木片和門黏接在一起。

6. 安裝Pixetto
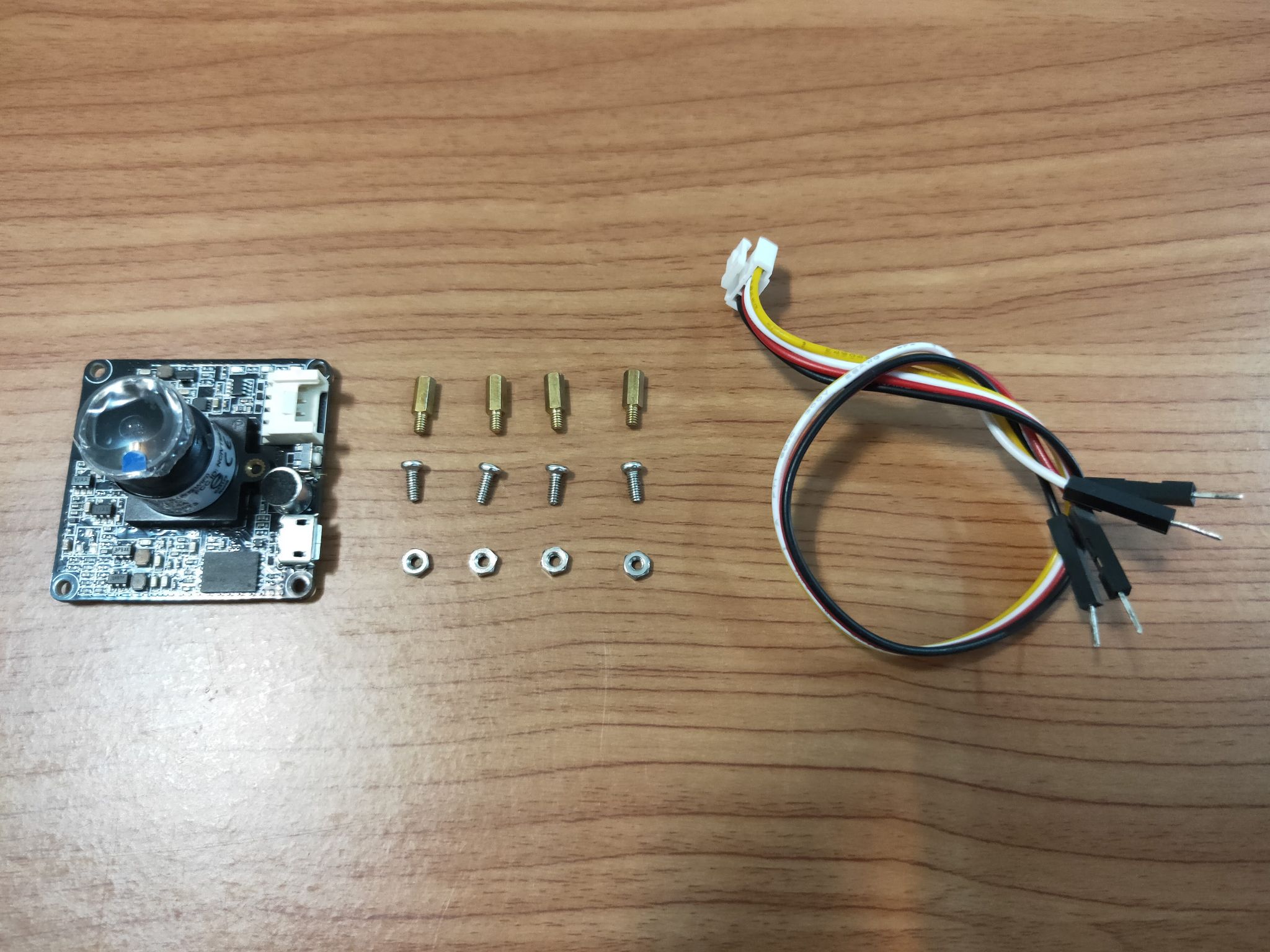
6-1. 準備如下圖所示Pixetto、Grove母座 to 4P公端杜邦線、M2x5mm螺絲4個、M2*6mm銅柱4個與M2螺帽4個。
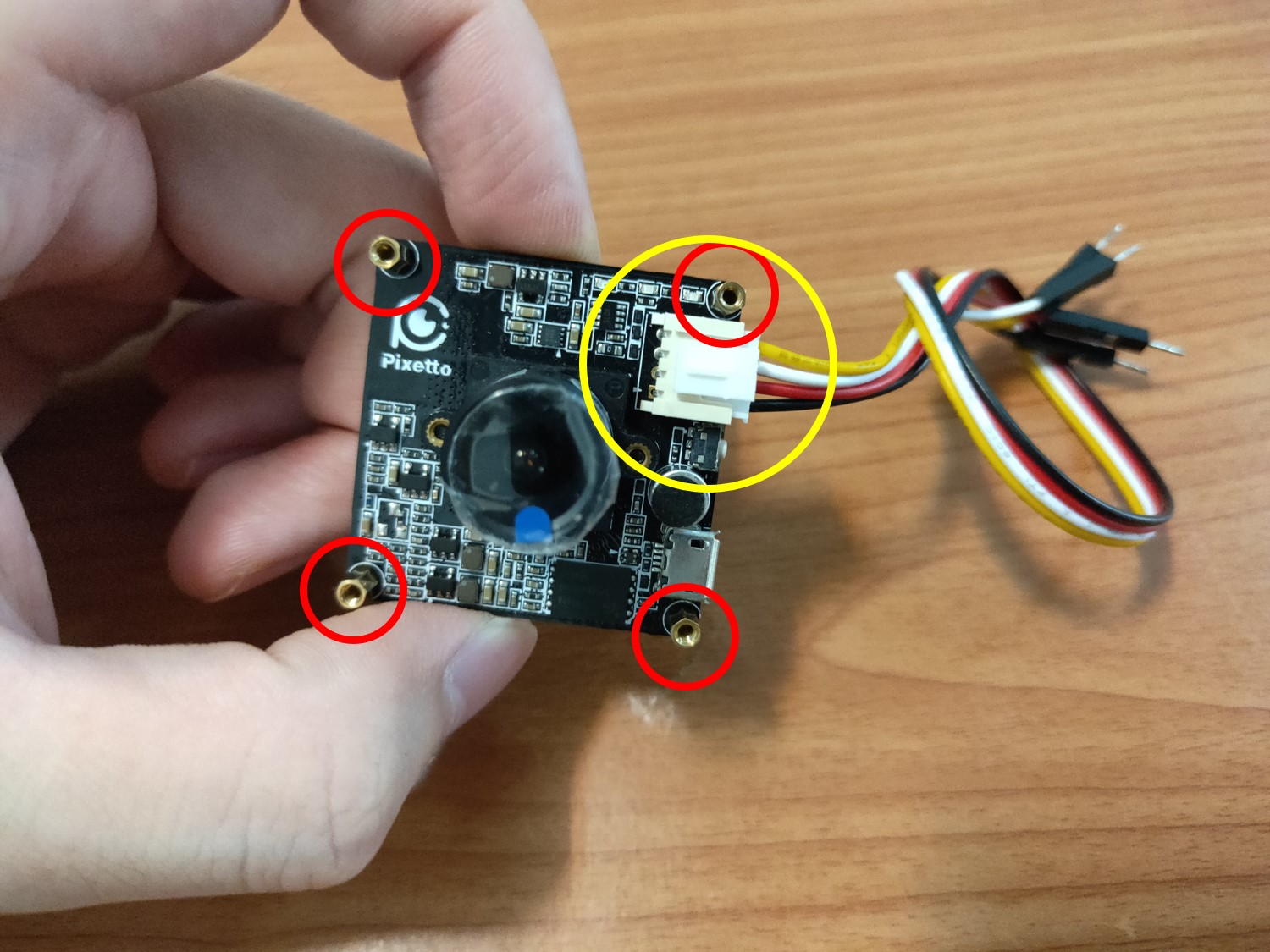
6-2. 將M2*6mm銅柱與M2螺帽如下圖方向安裝在Pixetto四角的孔洞上。

特別注意:Pixetto佈滿很多細小電子元件,在安裝銅柱與螺帽時要格外小心。並將Grove母座 to 4P公端杜邦線的母座端裝到Pixetto的Grove插槽。
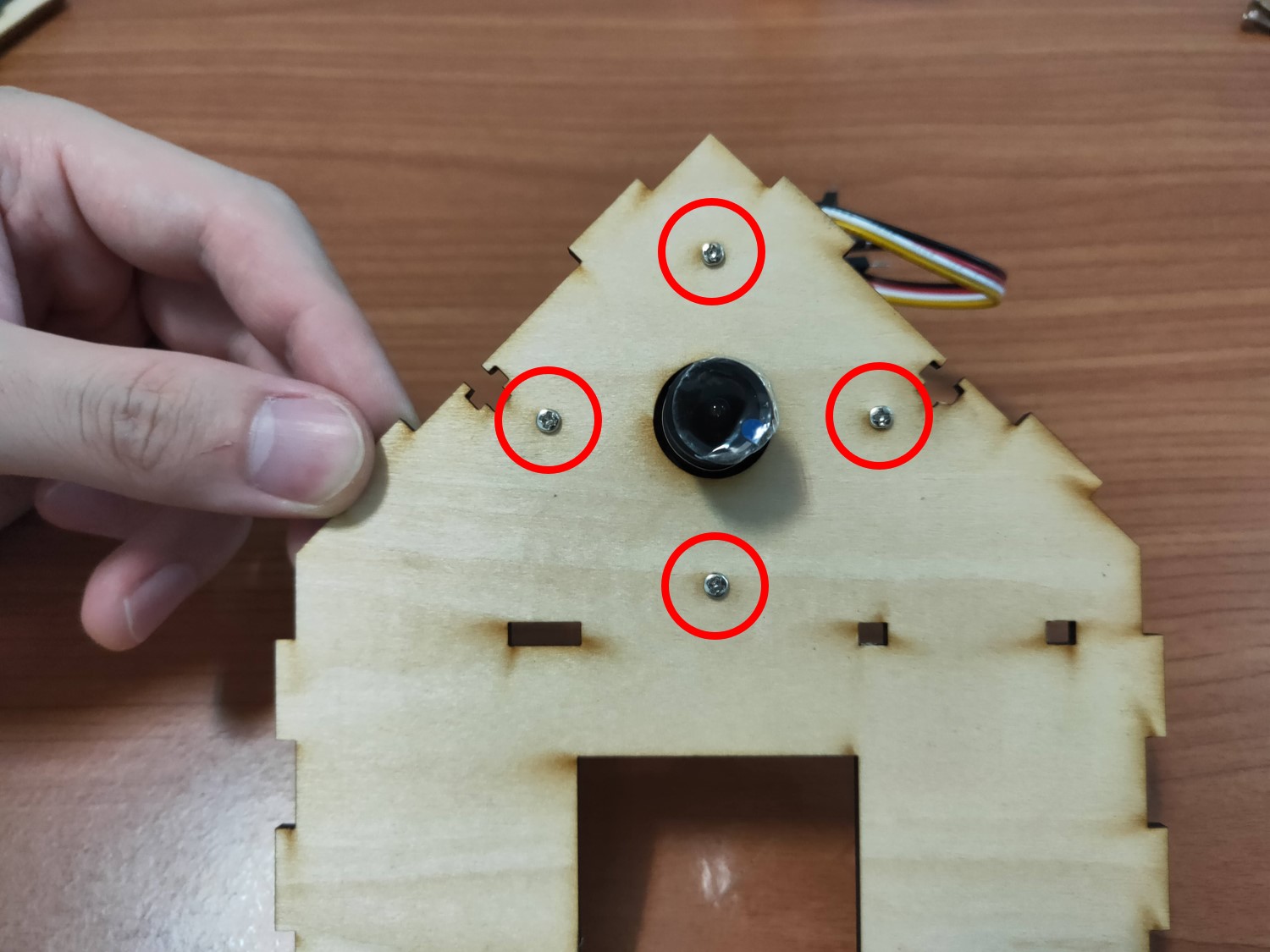
4-3. 將Pixetto依照下圖所示擺放在木板上,連接線朝左上邊。請注意木板孔位位置,左側為兩個小洞。

4-4. 正面用螺絲固定。