一、Lidarbot簡介
M5stack LidarBot 為官方推出的AGV教學套件,價格400美金的自走車麻雀雖小五臟俱全,不僅可以使用無線手把操控,同時透過結合Lidar掃描地圖的資料,使用開源函式庫介面Uiflow、Arduino 開發如 : 即時避障(obstacle avoidance) 、循線(Line following)等功能。本篇文章將帶大家一步一步從設定硬體到實作基本範例教學。
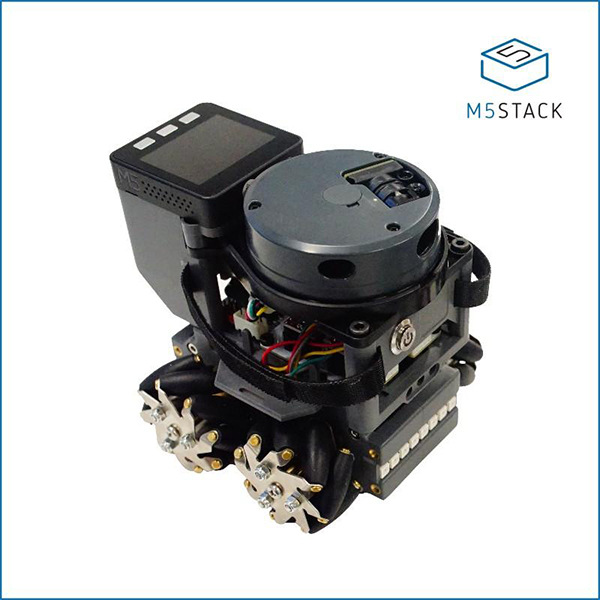
二、硬體介紹
M5stack LidarBot 主控板使用M5 Core Basic 讀取光學雷達的資料,馬達驅動板內建 MEGA328 可驅動四顆步進馬達搭配四顆麥克納姆輪,支援前進、水平橫移、斜向運動、原地旋轉,配件附贈大容量鋰電池可提供長時間的續航力,套件包中的無線手把與 Lidarbot 之間通過 ESP-NOW 進行即時通信,當程式功能運行時在Core螢幕上即可查看光學雷達掃描的地圖數據。
M5Stack官方也在 Github提供開源的代碼,基於官方源代碼的開發,可將雷達掃描採集數據通過Wi-Fi或其他通訊協定傳輸至其他節點。Lidarbot 不僅能夠應用在基礎程式教育如:Blocky、Micro python,完善的功能也適合低成本小型AGV專案開發。

三、基本操作說明
電源 :
套件包內附兩顆鋰電池必須透過專用的充電器充電, 鋰電池請勿過衝或是過放容易發生危險或是縮短電池使用壽命,充電燈號如下:

M5stack LidarBot 充電器-一紅一綠 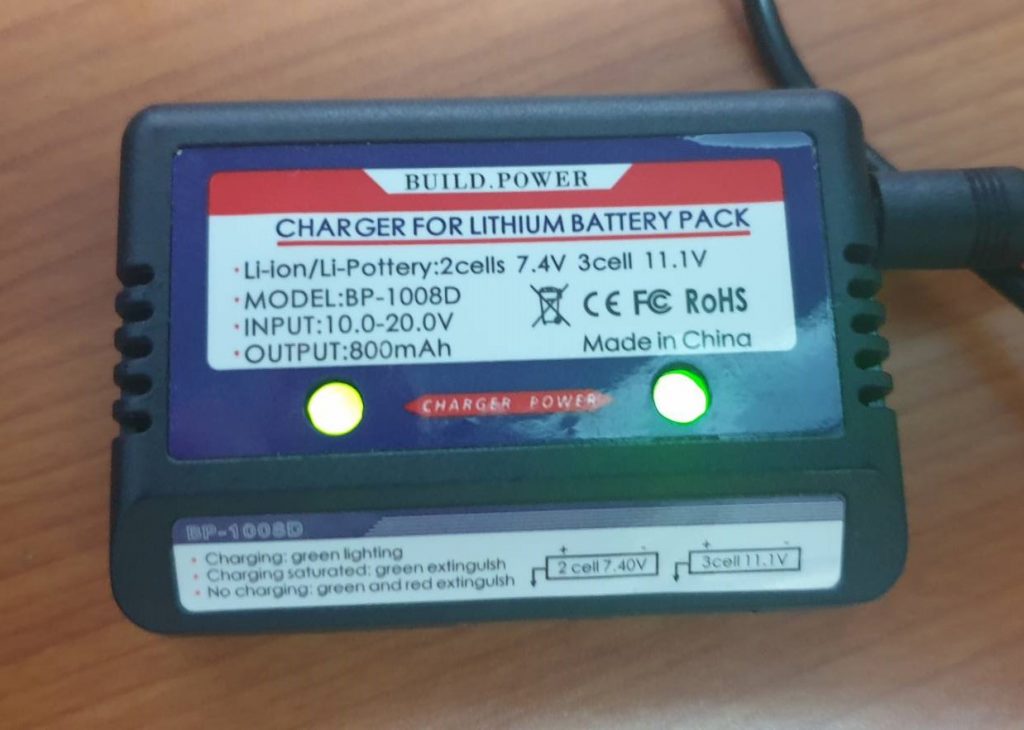
M5stack LidarBot 充電器 – 皆為綠燈
| 燈號顯示 | 一紅一綠 | 燈號皆為綠色 |
| 電池狀態 | 充電中 | 完成充電、尚未接入電池 |
等待兩顆電池都充飽後, 接上電源接頭利用 Lidarbot兩邊的魔鬼氈固定好,並整理線材避免干擾麥克納姆輪轉動,開啟電源

接上 Lidarbot 電源接頭 
開啟 Lidarbot 電源
啟動 Lidarbot電源後,接著啟動無線遙控手把,手把的主控板與 Lidarbot皆是M5 Core Basic,按一下側邊紅色電源鍵即可打開電源,建議如果長時間使用無線遙控手把,請接上TYPE-C充電線。
開啟 Lidarbot 電源 
開啟無線遙控手把電源
成功開啟電源後,預設的範例程式已經安裝在兩台主控版上並且透過ESP-NOW連線了,接下來我們就先來實作預設的範例程式吧!!
四、範例程式
1. 遙控模式
在預設的第一個模式下,Lidarbot的螢幕右上角顯示Remote,表示目前進入遠端操控模式,使用者可以自由地使用搖桿控制小車的前進方向。

2. 避障模式
Core螢幕上 Button C被定義為 Mode,表示可以透過 Button C 切換 Lidarbot的模式,按一下 Button C,螢幕右上角模式狀態顯示「Maze」,進入避障模式,Lidarbot會使用光學雷達感測周遭的障礙物,自行做出避開障礙物的判斷。
本文介紹了 M5Stack Lidarbot 的基本設定以及範例程式,接下來的進階篇將介紹如何透過 Uiflow以及Arduino開發 Lidarbot,並且說明 ESP-NOW通訊如何將 Lidarbot資料同步到無線手把。有興趣的朋友歡迎持續關注我們。