一、介紹
在「VMX 智慧移動平台教學 – 單元(一) 硬體介紹」,我們已經認識了VMX 智慧移動平台的硬體規格,在這個單元主要說明開發VMX-pi機器人控制器程式所需要安裝的軟體,包括IDE,擴充Library,機器人控制工具等。
二、安裝相關軟體
(一)軟體下載
到Studica Robotics官方的Software Setup頁面,選擇Offline Installer,如下圖所示。
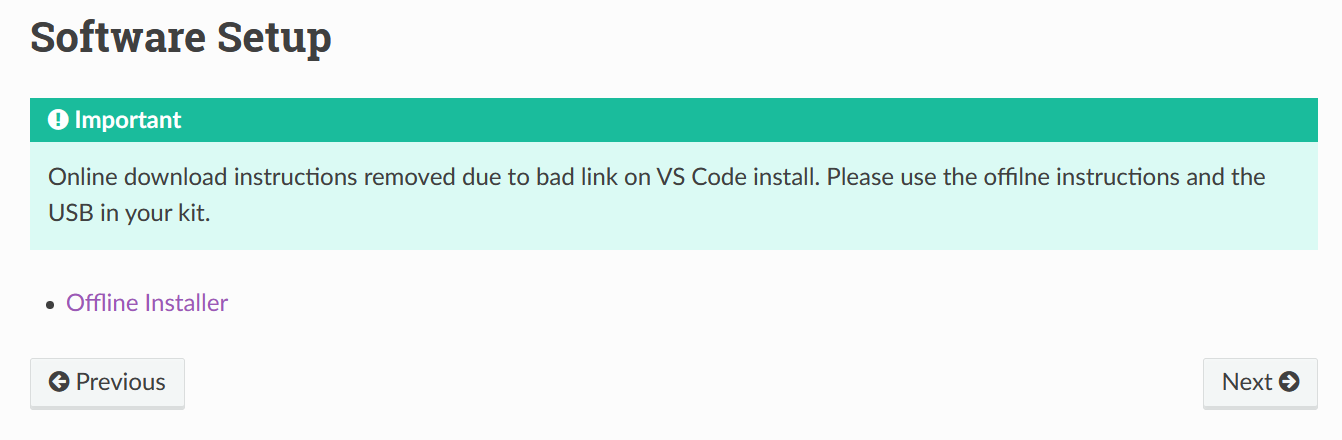
點選下載連結,如下圖所示。

依照作業系統下載(這裡示範Windows10 64bit),點擊進入Windows資料夾。

選取「offlineVsCodeFiles-1.41.1.zip」、「WPILibInstaller_Windows64-2020.3.2.zip」,並點選下載。

(二)軟體安裝
將「WPILibInstaller_Windows64-2020.3.2.zip」檔案解壓縮,執行「WPILibInstaller_Windows64-2020.3.2.exe」。
選擇「為所有使用者」或「當前使用者」安裝。

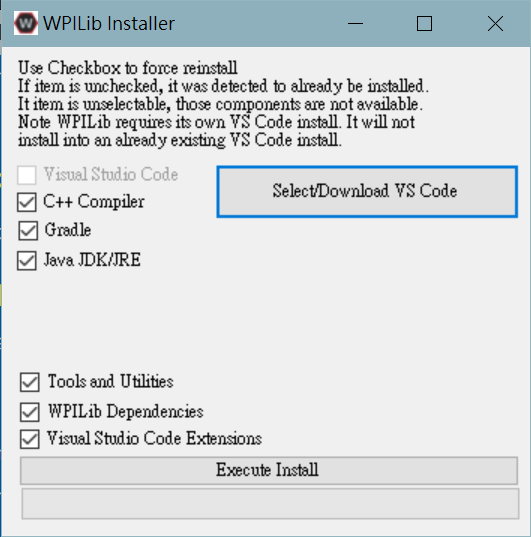
點選「Select/Download VS Code」按鈕。
選擇「Select Existing Download」選項。
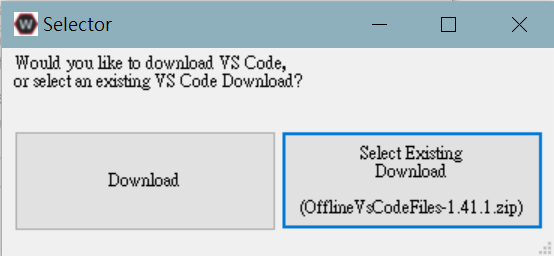
選取「OfflineVsCodeFiles-1.41.1.zip」檔案。

點選「Execute Install」按鈕安裝。

安裝工具會自動安裝以下內容:
- Visual Studio Code:特殊版本,與一般VsCode不同,專門用於開發機器人控制器程式碼的IDE。
- C++ Compiler:C++編譯器。
- Java JDK/JRE:Java編譯器、Java執行環境(特殊版本)。
- Gradle:用於建構Java或C++的特殊版Gradle。
- WPILib Tools:開發機器人控制器的擴充工具。
- WPILib Dependencies:WPILib的其他工具,e.g.OpenCV等。
- VS Code Extensions:VsCode中機器人控制器程式碼開發的擴充工具。
(三)工具介紹
1. FRC VS Code 2020
FRC VS Code 2020 是一個用於開發VMX-pi 的IDE,他是使用VsCode 製成的特殊版本,介面與VsCode相同。

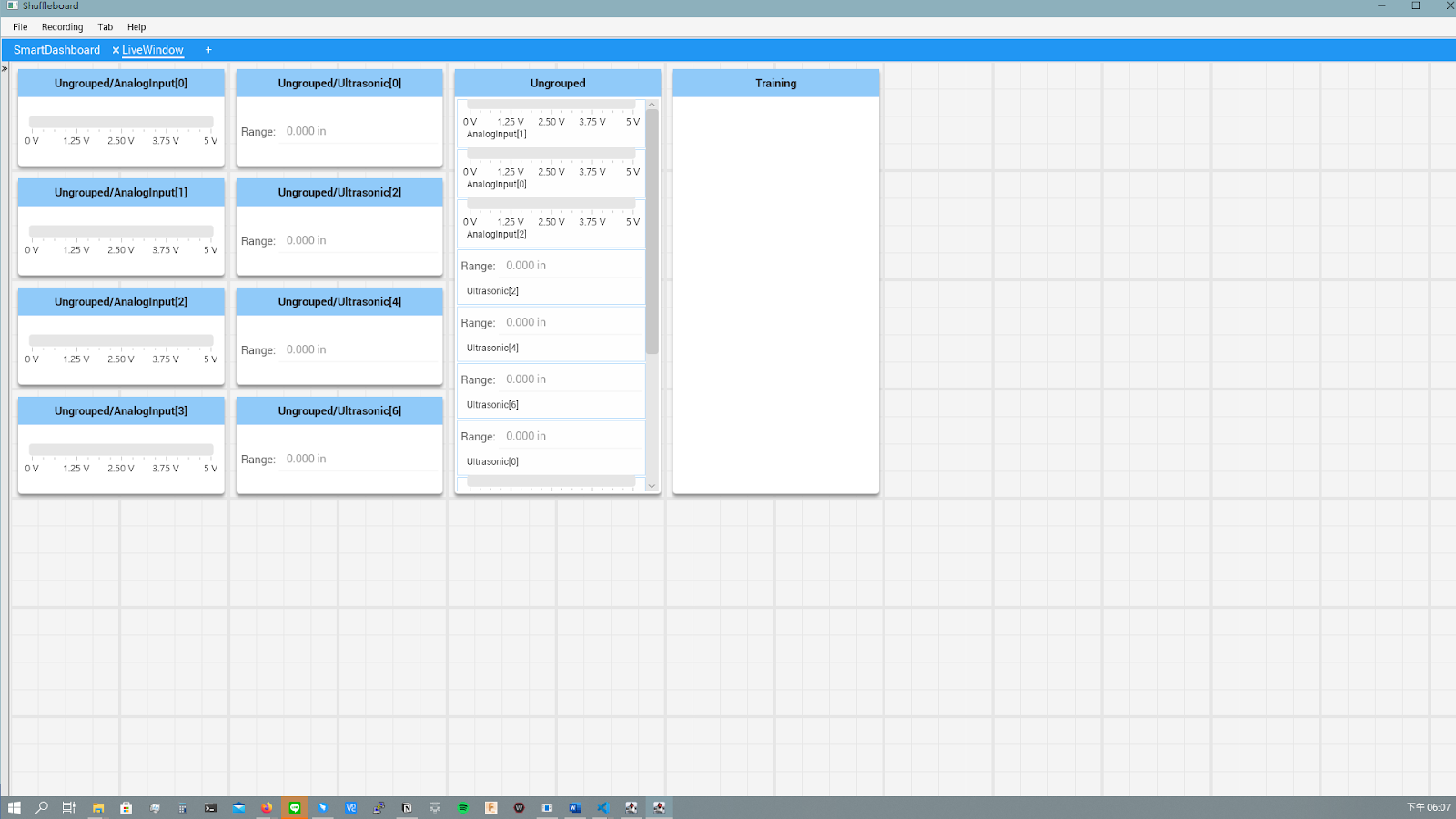
2. FRC Shuffleboard
FRC Shuffleboard 可用來與VMX-pi 溝通,可將感測器資料送到Shuffleboard 上顯示,也可透過Shuffleboard 控制VMX-pi。
三、環境設定
在環境設定部分我們需要為VsCode 安裝VMX-pi WPILib 擴充套件。
開啟「FRC VS Code 2020」。
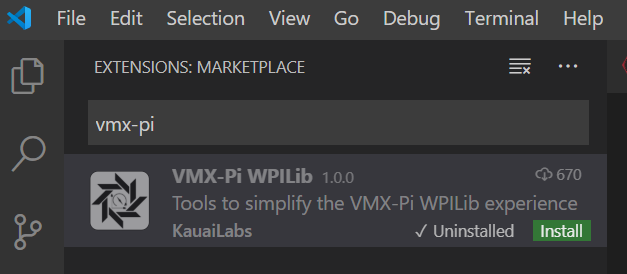
安裝VMX-pi 擴充工具,開啟左邊擴充工具安裝選項。
搜尋「vmx-pi」,點選「install」安裝。
四、上傳程式碼驗證安裝環境
在安裝IDE並設定好環境後,我們需要驗證是否可以正常編譯並部屬程式碼到VMX-pi上。
開啟「FRC VS Code 2020」,載入範例專案資料夾「Base_Project」。
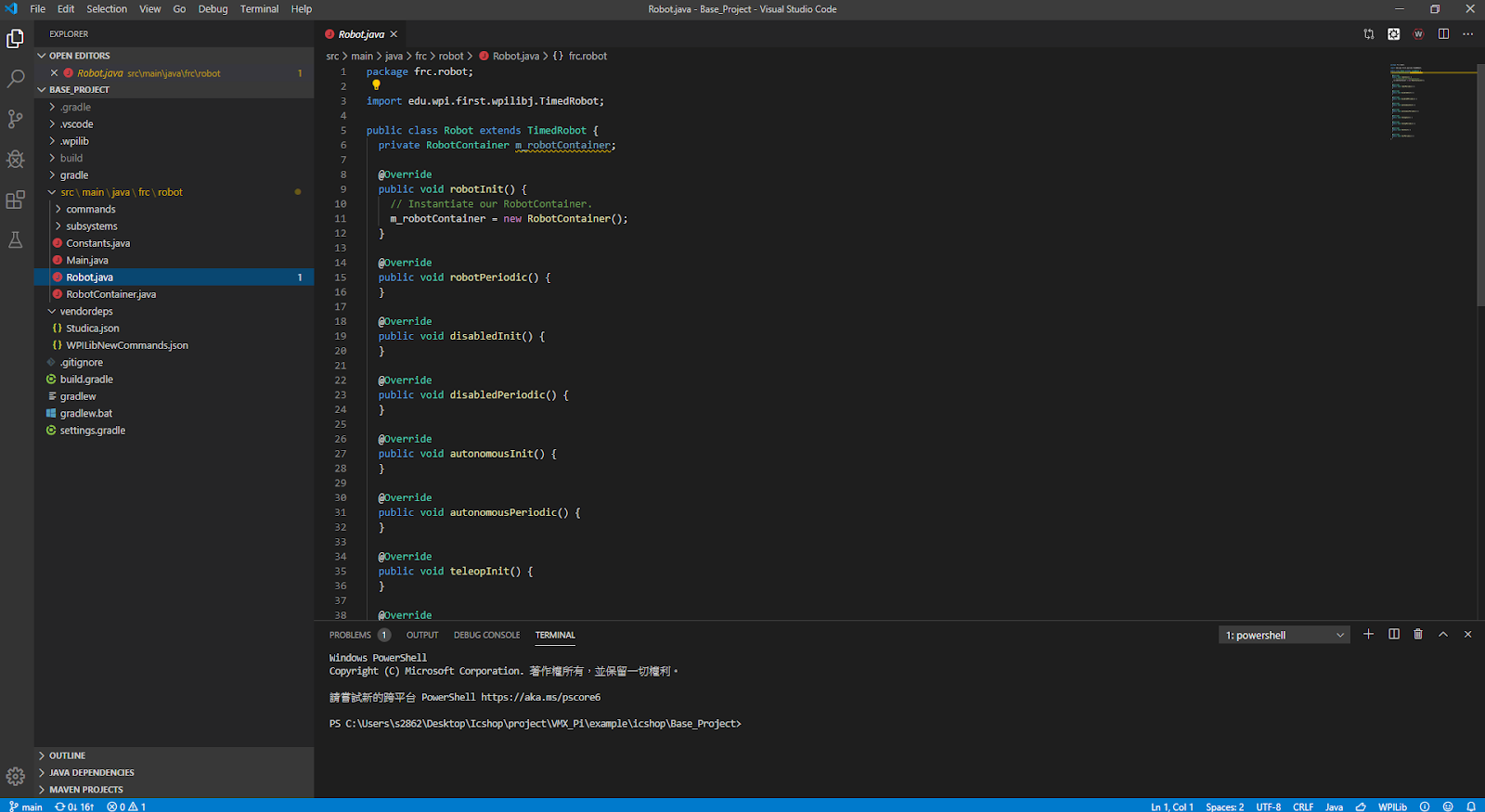
按下「F1」,輸入「VMX-Pi: change the deploy target to vmx-pi(from roborio)」,按下Enter。
他將會開始將此專案轉換為VMX-pi架構,轉換成功後將會看到綠色「BUILD SUCCESSFUL」字樣。

接著打開電源,啟動VMX-pi 機器人控制器,搜尋並連線Wi-Fi「VMXPI-1234」。

開啟Shuffleboard 工具選擇Test Table,看到「Hello World」字樣表示程式碼上傳成功,並且順利執行。

五、結語
本篇文章我們安裝了VMX-pi 機器人控制器的開發環境,也對開發環境做了基礎設定,將範例程式碼透過Wi-Fi 上傳至VMX-pi 機器人控制器上,並且透過Shuffleboard 查看VMX-pi 機器人控制器傳送過來的訊息(Hello World),驗證安裝環境是沒有問題的,下一篇我們將會讀取紅外線與超聲波感測器數值並顯示在Shuffleboard上。